

В настоящее время уделяется повышенное внимание направлению создания автономных необитаемых подводных аппаратов (АНПА) оснащенных системами подводного видения. Возможность получения объективной информации о подводной обстановке на различных глубинах погружения имеет важное значение для решения широкого спектра научных, народнохозяйственных и задач оборонного значения, при выполнении поисковых и аварийно-спасательных операций.
В частности, в интересах освоения природных ресурсов Мирового океана с использованием АНПА выполняются:
-
геодезическая съемка рельефа морского дна;
-
геологическая разведка на шельфе и в глубоководных районах Мирового океана;
-
осмотр и обследование подводных конструкций, установок нефте и газо добывающего комплекса, нефтепроводов и газопроводов, кабельных трасс и т. п.
В общем случае, при проектировании систем подводного видения АНПА, в зависимости от класса и решаемых ими задач, предъявляются соответствующие требования к дальности видимости, разрешающей способности, качеству получаемых фото и видео материалов, а также требования к массогабаритным характеристикам, рабочей глубине погружения и потребляемой мощности, определяющей время автономной работы при работе от аккумуляторных батарей.
В 2019 году АО «НИИ телевидения» в инициативном порядке разработало и изготовило образец АСПВ для малогабаритного АНПА АО «Концерн «НПО «Аврора», внешний вид которого приведен на рисунке 1.
Основные технические характеристики АНПА [1]:
-
Габаритные размеры: диаметр – 200 мм, длина – 2150 м
-
Масса: 63 кг (включая твердый балласт
-
Глубина погружения: 1000 м
-
Максимальная скорость: 2,5 м/с
-
Автономность: не менее 6 ч
Система подводного видения АНПА предназначена для проведения фото и видеосъёмки морского дна на дистанциях от 2 до 5 метров с возможностью разрешения объектов размером от 20 мм при скорости хода АНПА до 3-х узлов. Для уменьшения мощности потребления АСПВ в режиме фото и видео съемки применена светодиодная импульсная подсветка. Конструкция составных частей АСПВ предусматривает их установку в герметичные отсеки АНПА, см. рисунок 2.

Рисунок 1. Внешний вид АНПА

а) б) в)
Рисунок 2. Составные части АСПВ
В состав опытного образца АСПВ входят:
-
блок телекамеры (рисунок 2а);
-
конструктивная сборка Блока питания и управления и Процессорного модуля (рисунок 2б);
-
осветитель светодиодный (рисунок 2в).
Структурная схема АСПВ приведена на рисунке 3.
Блок телекамеры (рисунок 2а) конструктивно состоит из монохромной ТВ камеры с объективом и оправы с защитным стеклом для крепления в герметичный отсек АНПА. ТВ камера формирует изображения на дистанциях съемки от 2 до 5 м в широком диапазоне относительной прозрачности водной среды Zб. Относительная прозрачность воды Zб, измеренная по белому диску Секки, служит оценкой дальности видимости систем подводного видения. В настоящее время требование к дальности видимости монохромной системы подводного видения должно быть не хуже Zб.
Для обеспечения возможности наблюдения и съёмки объектов указанного размера в водной среде на заданных дистанциях, ТВ камера системы подводного видения должна иметь высокую контрастную чувствительность и высокую разрешающую способность [2,3].
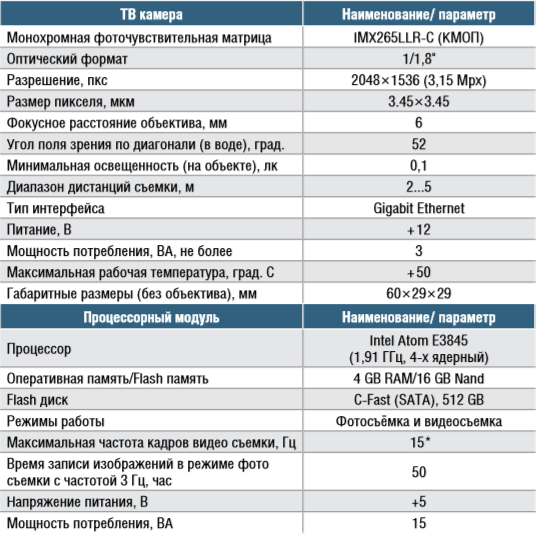
На основе анализа приведенных в работах [2,3] критериев выбора фоточувствительных матриц– квантовой эффективности, порога абсолютной чувствительности, величины отношения сигнал/шум, динамического диапазона и числа фоточувствительных элементов, была выбрана ТВ камера с Ethernet интерфейсом на монохромной КМОП матрице [Sony] IMX265LLR: число фоточувствительных элементов 2048×1536, размер элемента 3,45×3,45 мкм. ТВ камера имеет высокую контрастную чувствительность, небольшие массогабаритные характеристики и оптический формат 1/1.8ʺ.
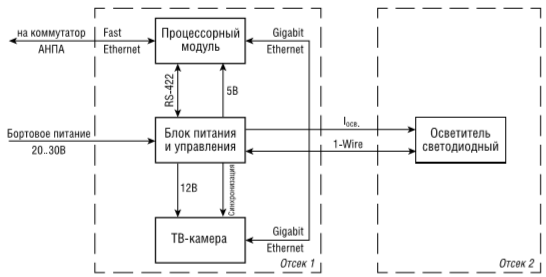
Рисунок 3. Структурная схема АСПВ
В ТВ камере применен мега пиксельный объектив TAMRON M118FM06 с фокусным расстоянием 6 мм и диафрагменным числом 1,4, который обеспечивает угол поля зрения в воде 52 градуса и глубину резкости на дистанциях съёмки без подстройки. Для обеспечения импульсного режима подсветки ТВ камера имеет внешнюю синхронизацию и программное управление временем накопления.
С точки зрения критерия Джонсона [4], выбранная ТВ камера обеспечивает наблюдение неподвижных объектов размерами 20×20 мм и протяженных объектов размером от 20 мм, поскольку в неподвижном положении на дистанции съёмки 5 м объект занимает на матрице ~7 эл, а на дистанции 2 м ~ 17 эл.
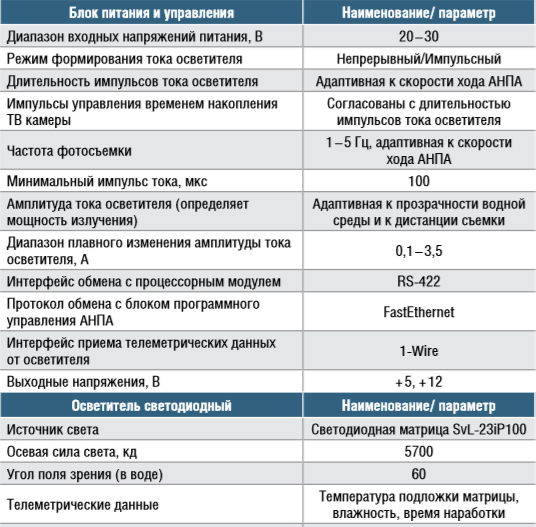
Для обеспечения необходимого уровня освещённости объектов наблюдения на заданных дистанциях съёмки разработан осветитель светодиодный (рисунок 2в) на матрице SvL-23iP100. Осевая сила света осветителя 5700 кд, угол излучения в воде 600, мощность потребления в непрерывном режиме излучения 100 ВА. В осветителе имеется контроллер с датчиками измерения температуры и влажности, кроме того, контроллер измеряет время наработки светодиодной матрицы.
При применении внешней подсветки контраст объекта уменьшается не только из-за ослабляющего действия воды, но и из-за эффекта объёмного рассеяния энергии при прохождении светового пучка через водную среду, которое воспринимается оптическим приёмником как свечение самой воды (световая дымка) и называется помехой обратного рассеяния (ПОР), которая значительно снижает яркостной контраст объекта наблюдения [5]. Заметим, что увеличение мощности источников света не позволяет пропорционально увеличить контраст объекта наблюдения, поскольку с ростом мощности излучения растёт и вуалирующая яркость ПОР.
В разработанной АСПВ для уменьшения ПОР применено пространственное разнесение источника света и ТВ камеры. Величина разнесения и угол наклона светильника относительно оптической оси объектива были рассчитаны таким образом, чтобы при заданных дистанциях наблюдения (2 – 5 м), габаритах АНПА и компоновки в нём оборудования, максимально уменьшить засвеченный объём воды от источника света перед ТВ камерой.
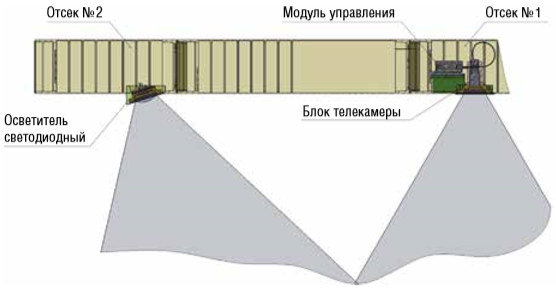
Рисунок 4. Пространственное разнесение осветителя и ТВ камеры в АНПА
Блок питания и управления конструктивно выполнен в виде печатной платы, размещенной над процессорным модулем, см. рисунок 2б. Блок питания и управления информационно связан с ТВ камерой, осветителем светодиодным и процессорным модулем, см. структурную схему АСПВ (рисунок 3), и выполняет следующие функции:
-
формирует из бортового напряжения 20…30В напряжения питания +5 В для процессорного модуля и контроллера осветителя и напряжение питания +12 В для ТВ камеры;
-
по команде процессорного модуля формирует импульсный или постоянный ток питания светодиодной матрицы в диапазоне от 0,1 до 3,5 А в зависимости от требуемой мощности излучения;
-
принимает по интерфейсу 1-Wire телеметрические данные от осветителя – температуру подложки матрицы, относительную влажность в отсеке осветителя и наработку светодиодной матрицы и передает данные по интерфейсу RS-422 в процессорный модуль для принятия решения о техническом состоянии устройства;
-
обеспечивает синхронизацию времени накопления ТВ камеры и времени излучения осветителя подачей сигнала синхронизации в ТВ камеру синхронно с формированием тока питания светодиодной матрицы осветителя.
Процессорный модуль – одноплатный компьютер формата 3,5ʺ на базе процессора Intel Atom E3845, 4 ядра, базовая частота 1.91 ГГц.
В процессорном модуле установлены:
-
оперативная память 4 GB;
-
Flash память 16 GB;
-
Flash диск 512 GB для записи и хранения фото и видео материалов;
-
разработанное специализированное ПО АСПВ.
Процессорный модуль АСПВ информационно связан с бортовым компьютером АНПА по сети Fast Ethernet, с ТВ камерой – по сети Gigabit Ethernet, а с блоком питания и управления – по интерфейсу RS-422, см. рисунок 3.
Процессорный модуль совместно с блоком питания и управления обеспечивает:
-
импульсный режим подсветки при формировании изображений, где время излучения согласовано с временем экспозиции в ТВ камере;
-
адаптацию длительности экспозиции к скорости хода АНПА и к дистанции съёмки;
-
адаптацию фотосъёмки к скорости хода АНПА;
-
адаптацию мощности излучения осветителя к прозрачности водной среды и к дистанции съёмки;
-
контроль технического состояния составных частей АСПВ.
Кроме того, процессорный модуль выполняет:
-
цифровую обработку изображений с использованием адаптивного алгоритма контрастирования CLAHE;
-
запись фото и видео изображений на Flash диск;
-
приём служебной информации о скорости хода АНПА, расстоянии до дна, географических координатах от бортового компьютера и передачу данных о техническом состоянии АСПВ в бортовой компьютер;
-
передачу записанных фото и видео изображений в бортовой компьютер АНПА.
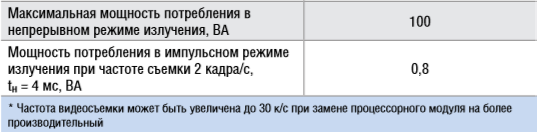
Импульсный режим подсветки при фото и видеосъёмке значительно уменьшает потребляемую мощность осветителя АСПВ и позволяет увеличить время автономной работы АНПА при ограниченной мощности аккумуляторных батарей. Так, в режиме фотосъёмки с частотой 2 кадра/сек с 50% перекрытием кадров, при времени накопления 4 мс потребляемая мощность импульсного светильника будет в 125 раз меньше, а при частоте видеосъёмки 25 кадров/сек – в 10 раз меньше по сравнению с непрерывным излучением, что составляет 0,8 и 10 ВА, соответственно.
Адаптация длительности экспозиции к скорости хода АНПА и к дистанции съёмки уменьшает «смаз» изображений и обеспечивает требуемое разрешение АСПВ.
Адаптация режима фотосъёмки к скорости хода АНПА оптимизирует число записываемых кадров в процессе съёмки и позволяет уменьшить требование к объёму накопителя. При увеличении скорости хода АНПА число кадров съёмки увеличивается при сохранении требований к перекрытию кадров, а при уменьшении скорости хода – уменьшается.
Адаптация мощности излучения светильника к прозрачности водной среды и к дистанции съёмки позволяет дополнительно уменьшить мощность потребления АСПВ. В результате анализа в процессорном модуле гистограммы изображений от ТВ камеры, формируется необходимая величина тока питания светильника для изменения мощности излучения.
Информацию о скорости хода АНПА и расстоянии до дна для адаптации процессорный модуль АСПВ получает от бортового компьютера АНПА.
Основные технические параметры АСПВ приведены в таблице 1 [3].
Таблица 1. Основные технические параметры АСПВ
Для проверки возможности наблюдения и съёмки указанных объектов наблюдения на скоростях хода АНПА и режимов адаптации, была предложена методика проведения лабораторных испытаний АСПВ без водной среды, которая не исключает натурных испытаний, но позволяет проверить технические решения, промоделировать и отладить алгоритмы цифровой обработки в приближенных к натурным условиям наблюдения и, тем самым, сократить продолжительность испытаний АНПА в водной среде.
Суть методики испытаний состоит в том, чтобы создать в лабораторных условиях в воздухе такую освещенность объектов наблюдения, которая была бы аналогичной для объектов наблюдения в водной среде при заданных дистанциях наблюдения и относительной прозрачности воды, а также обеспечить перемещение объектов наблюдения в диапазоне скоростей хода АНПА.
Для этого аналитически рассчитываются коэффициенты ослабления прямого и отраженного от объекта наблюдения светового излучения водной средой, затем подбираются нейтральные светофильтры, обратная величина коэффициентов пропускания которых (коэффициенты ослабления) равнялась бы рассчитанным коэффициентам ослабления водной средой. Далее выбранные светофильтры устанавливаются перед объективом ТВ камеры для получения необходимой освещенности объектов наблюдения в процессе испытаний.
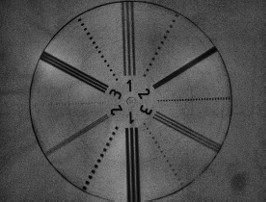
Для имитации движения АНПА со скоростями хода 1...3 узла (0.5 м/с...1.5 м/с), оценки обнаружения и разрешения объектов наблюдения с разными контрастами, была разработана круглая универсальная мишень, смотри рисунок 5, размещаемая на устройстве вращения.
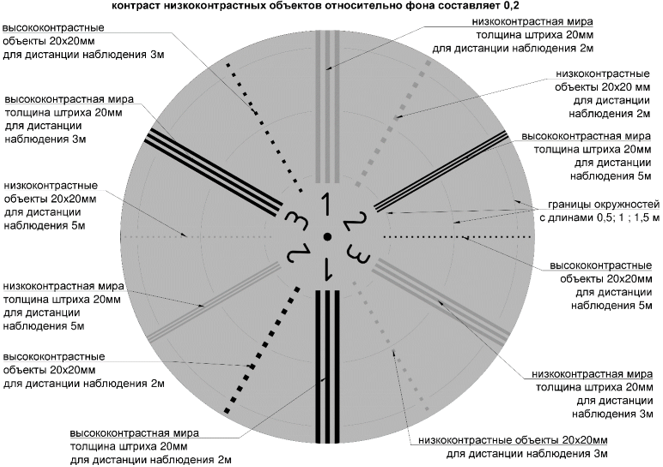
Рисунок 5. Круглая универсальная мишень
На мишени нанесены три концентрические окружности. Длина большой окружности равна 1.5 м, средней - 1 м и маленькой окружности - 0.5 м. Таким образом, диаметр универсальной мишени немного больше или равен диаметру большой окружности.
На мишени напечатаны типовые объекты наблюдения в виде квадратов и протяженные объекты в виде штриховых мир, где низко контрастные объекты и миры имеют контраст 0.2 относительно фона. Размеры квадратов на мишени соответствуют объектам наблюдения 20*20 мм, а ширина штрихов миры - протяженным объектам шириной 20 мм на дистанциях наблюдения 2 м, 3 м и 5 м, соответственно.
Имитация движения объектов наблюдения со скоростями от 0.5 до 1.5 м/с осуществляется одновременно за счёт вращения универсальной мишени с частотой 1 оборот/сек. При этом линейная скорость перемещения элементов мишени, расположенных на окружности большого диаметра составляет 1.5 м/c, на окружности среднего диаметра – 1м/c и на окружности малого диаметра – 0.5 м/c. Объекты, расположенные между окружностями малого и большого диаметров, будут иметь скорости перемещения от 0.5 до 1.5 м/с.
Приведем некоторые результаты лабораторных испытаний с использованием описанной выше методики.
Для определения времени накопления ТВ камеры и длительности импульсов подсветки для разрешения типовых объектов в режимах фото и видео съемки на скоростях хода АНПА расчетное время экспозиции вычислялось из допустимости "смаза" 4 мм при наблюдении объектов размерами 20*20 мм.
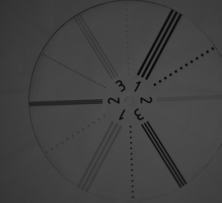
На рисунке 6 приведены изображения, полученные при времени накопления 8 мс, 4 мс, 2.7 мс. Освещенность мишени соответствует освещенности объектов в водной среде с дистанции наблюдения ТВ камерой 2 м при Zб=10 м.

Время накопления t=8мс

Время накопления t=4мс
Время накопления t=2,7мс
Рис.6 Примеры изображений для определения времени накопления на скоростях хода АНПА без цифровой обработки
Миры 1,3 и 2 соответствуют объектам наблюдения размером 20 мм на дистанциях наблюдения 2 м, 3 м и 5 м.
При времени накопления 8 мс разрешаются миры 1 и 3 при скорости их перемещения 0.5 м/с. При времени накопления 4 мс разрешаются миры 1,2 и 3 при скорости перемещения 0.5 м/с, а при скорости 1м/с разрешаются миры 1 и 3. При времени накопления 2.7 мс разрешаются миры 1 и 3 при скорости перемещения 1.5 м/с, а мира 2 не разрешается. Для разрешения миры 2 необходимо уменьшить время накопления до 2 мс.
Протяженные объекты наблюдаются при любой экспозиции, но с увеличением смаза и уменьшением их контрастности.
При уменьшении относительной прозрачности водной среды и с увеличением дистанции наблюдения качество получаемых изображений значительно ухудшается и для улучшения качества получаемых изображений требуется цифровая обработка.
Результаты моделирования показали, что для повышения качества фото и видео изображений в водной среде целесообразно использовать алгоритм адаптивного контрастирования CLAHE, см рисунок 7, а при ухудшении условий наблюдения режим автоматического перехода на биннинг 2*2 с контрастированием, но за счет уменьшения разрешения.
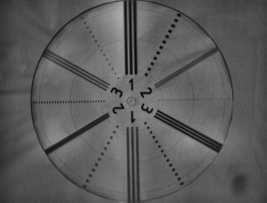
Zб=10 м
Zб=7 м

Zб=7 м
Биннинг 2*2
Рис.7 Изображения после обработки алгоритмом контрастирования CLAHE для дистанции наблюдения 3 м, экспозиция 4 мс.
Заключение
Область робототехники с использованием автономных необитаемых подводных аппаратов, оснащенных системами подводного видения, имеет важное значение для решения широкого спектра научных, народнохозяйственных и оборонных задач.
При создании систем подводного видения для автономных подводных аппаратов целесообразно использовать импульсный режим подсветки, где время излучения согласовано с временем накопления в ТВ камере. Это позволяет при фото и видеосъёмке значительно уменьшить потребляемую мощность осветителя АСПВ и увеличить время автономной работы АНПА, что важно при ограниченной мощности аккумуляторов.
Адаптация времени накопления ТВ камеры к скорости хода АНПА и к дистанции съёмки позволяет обеспечить требуемое разрешение АСПВ и повысить качество формируемых изображений.
Адаптация режима фотосъёмки к скорости хода АНПА оптимизирует число записываемых кадров в процессе съёмки и позволяет уменьшить требование к объёму накопителя.
Для повышения качества формируемых изображений необходимо использовать ТВ камеры с высокой контрастной чувствительностью и разрешением, пространственное разнесение источника света и ТВ камеры, а также использовать адаптивный алгоритм цифрового контрастирования CLAHE.
Литература:
1. https://www.avrorasystems.com/ru/Data/Pressroom/Files/ANPA.pdf
2. Войтов А.А., Сергеев В.В., Соколов В.А., Форсов Б.Ю. «Формирование изображений в активных системах подводного видения». Вопросы радиоэлектроники, сер. Техника телевидения, 2015, вып.5. С. 21-31.
3. Сергеев В.В., Карпов В.В., Прибылов Ю.С., Соколов В.А. «Активная система подводного видения для автономных необитаемых подводных аппаратов». Вопросы радиоэлектроники, сер. Техника телевидения, 2019, вып.2, с. 53-61.
4. Воробьев А.Л., Журик Ю.П., Краснов А.М., Шашков С.Н. «Методика вероятностного анализа процесса наблюдения в цифровых телевизионных системах видимого диапазона». Электронный журнал «Труды МАИ». Выпуск № 49, 2011, 29 с.
5. Долин Л.С., Левин И.М. «Справочник по теории подводного видения». – Л.: Гидрометеоиздат, 1991. – 229с.




