

Существует большое количество методов обнаружения несанкционированных очагов возгорания [1, 2]. Однако большинство из них имеет существенные ограничения по своим основным характеристикам: небольшая зона контроля, малая дальность действия, значительная инерционность. В ряде ситуаций узкоспециализированные локальные системы способны решить поставленные перед ними задачи, но в случае лесных пожаров перечисленные ограничения неприемлемы.
Сегодня на первый план выступают способы, основанные на анализе видеоизображений наблюдаемой местности [3]. Информационная насыщенность полученных изображений, появление в последние годы большого количества реализуемых алгоритмов целевой их обработки позволяют обнаружить и локализовать очаги задымления и возгорания в лесных массивах. Причем с помощью видеонаблюдения можно зафиксировать пожар на очень большом расстоянии, свыше 10 км. А использование нескольких видеодатчиков (видеокамер) позволяет охватить наблюдением большие территории, осуществляя так называемый видеомониторинг. Однако видеомониторинг не должен ограничиваться только идеей распределенного видеонаблюдения. Он должен представлять собой сложный информационный аппаратно-программный комплекс, обладающий большим потенциалом автоматизации благодаря применению современных технологий, таких как IP-видеонаблюдение, клиент-серверные интернет-технологии, компьютерное зрение, беспроводная высокоскоростная связь.
Таким образом, комплекс обнаружения лесного пожара предполагает наличие двух основных частей: аппаратной и программной.
Функционирование и состав комплекса
Аппаратная часть комплекса включает сеть управляемых датчиков видеонаблюдения, а также аппаратуру связи, контроля, управления и вычисления. Такая система легко масштабируется и расширяется.
Комплекс, ведущий видеомониторинг окружающей территории, должен работать следующим образом. На неспециализированных высотных сооружениях (вышках операторов сотовой связи, провайдеров связи, телевизионных, радиовещательных, вышках наземного мониторинга) размещаются дистанционно управляемые видеокамеры. На охраняемом объекте размещается центр контроля и управления, в котором находится оператор и аппаратура отображения, обработки и анализа принятой видеоинформации. При автоматическом обнаружении возгорания подается сигнал тревоги. По этому сигналу оператор по изображению на мониторе дает уже окончательную оценку ситуации.
Комплекс включает следующие элементы:
-
Распределенная система управляемых видеокамер;
-
Каналы связи, соединяющие видеокамеры с сетью Интернет;
-
Сервер системы;
-
Оборудование автоматизированного рабочего места оператора, включающего ПК с соответствующим программным обеспечением и возможностью высокоскоростного подключения к сети Интернет.
Комплекс для проведения видеомониторинга леса с целью обнаружения лесного пожара должен обеспечивать:
-
Получение видеоизображений cо всех камер;
-
Дистанционное управление ориентацией и параметрами видеокамер;
-
Запоминание текущей видеоинформации для дальнейшего просмотра и анализа;
-
Автоматическое определение области возгорания и подачу сигнала тревоги;
-
Надежную связь с необходимыми службами.
Программная часть
Программная часть – это программы обработки принятых видеоизображений, позволяющие оперативно обнаружить момент, область и координаты возгорания.
Известен ряд способов обработки и анализа видеоизображений, которые с той или иной точностью выполняют задачу обнаружения и определения местоположения очага пожара на местности [3, 4]. Эти методы можно разбить на три группы: гистограммные, методы, основанные на динамических признаках, и комбинированные. Большинство из них базируется на таком характерном признаке огня и дыма, как цвет. И основной процедурой обнаружения является сегментация.
Сегментация – разделение изображения на области, для которых выполняется определенный критерий однородности, например, выделение на изображении областей (связной группы элементов) приблизительно одинаковой цветности и яркости.
Для правильного обнаружения пожара необходимо знать цветовой диапазон исследуемого объекта (огня и дыма). Несмотря на различия, все известные колориметрические системы обнаруживают одно общее для них свойство, а именно наличие сильной корреляционной связи между областями конкретных цветовых компонентов изображения. Цвет сравнительно слабо меняется в пределах конкретной области и сильно изменяется при переходе из одной области к другой.
Метод цветовых гистограмм – наиболее популярный из методов, использующих цветовые характеристики для сегментации и индексирования изображений [5]. Идея метода сводится к следующему: все множество цветов анализируемого изображения разбивается на набор непересекающихся подмножеств. По полученному изображению формируется цветовая гистограмма, отражающая долю каждого подмножества в общей цветовой гамме изображения. Для сравнения гистограмм вводится понятие расстояния между ними. Известны различные способы построения и сравнения цветовых гистограмм, отличающихся между собой изначальной цветовой схемой, размерностью гистограммы и определением расстояния между гистограммами.
В нашем случае, когда защищаемый объект находится в лесной, лесотундровой или лесостепной зоне, огонь и дым от пожара довольно заметно отличаются от неподвижного фона по яркости (рис. 1 и 2). Переход от обработки и анализа цветного изображения к черно-белому существенно упростит алгоритмы сегментации и обнаружения очага возгорания.
Один из основных и простых способов сегментации – это пороговая обработка. Операция порогового разделения (бинаризация) заключается в сопоставлении значения яркости каждого пикселя изображения с заданным значением порога. В случае одного порога исходное изображение преобразуется в бинарное, что существенно уменьшает количество второстепенной информации, содержащейся в изображении [6].

РИС. 1. Изображения очагов пожара
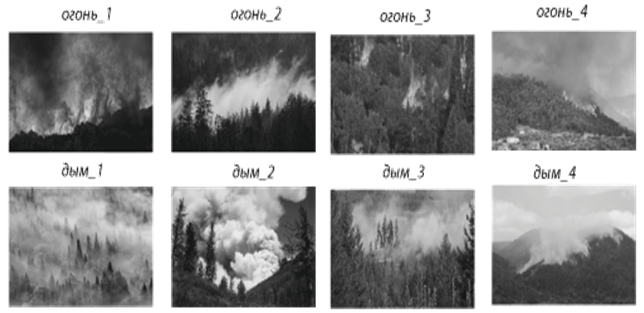
РИС. 2. Яркостная составляющая изображений пожара
Таким образом алгоритм выделения объектов из окружающего фона состоит в выборе значения порога, разграничивающего моды распределения яркостей на изображении. Простейший из методов пороговой обработки состоит в разделении гистограммы изображения на две части с помощью единого глобального порога. При поэлементном сканировании изображения каждый пиксель отмечается как относящийся к объекту (огонь, дым) или фону в зависимости от того, превышает ли яркость данного пикселя значение порога или нет. Успешность этого метода целиком зависит от того, насколько хорошо гистограмма изображения поддается разделению. Изучение большого числа видеоизображений реальных ситуаций подтверждает целесообразность этого подхода.
Для автоматического выбора значения порога g в случае бимодальной гистограммы может применяться следующий итеративный алгоритм:
-
Выбирается некоторая начальная оценка значения порога g;
-
Выполняется сегментация изображения с помощью порога g. В результате образуются две группы пикселей: G1, превышающих g, и G2, имеющих яркость меньше или равную g;
-
Вычисляются средние значения μ1 и μ2 яркостей пикселей для групп G1 и G2 соответственно;
-
Вычисляется новое значение порога g = (μ1+μ2)/2;
- Повторяются шаги со второго по четвертый до тех пор, пока разница значений порога g в соседних итерациях не окажется меньше наперед заданного параметра ε.
Отметим, что если объекты и фон на изображении занимают сравнимые площади, то хорошим начальным приближением для порога является средний уровень яркости изображения. Если же занимаемая объектами площадь мала по сравнению с площадью фона (или наоборот), то одна из групп пикселей будет доминировать в гистограмме, и средняя яркость окажется не слишком хорошим начальным приближением. В подобных случаях более подходящим начальным значением g является полусумма минимального и максимального значений яркости. Параметр ε используется для остановки алгоритма, когда изменения на каждой итерации становятся малы по сравнению с заданным параметром.
Полученное бинарное изображение, кроме информативных участков может содержать шумовые выбросы и небольшие яркие пятна от всевозможных бликов. С целью устранения подобного рода помех и улучшения связности выделенных областей имеет смысл осуществить внутрикадровую морфологическую обработку (фильтрацию) [6] (рис. 3).
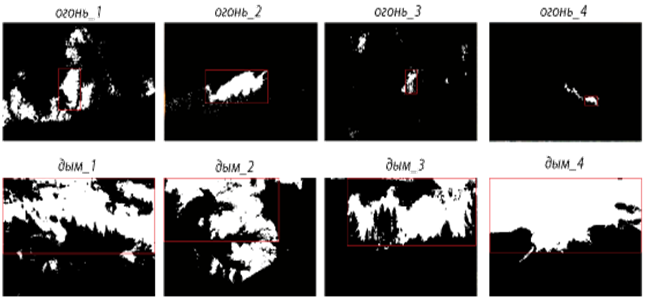
РИС. 3. Бинарные изображения огня и дыма после морфологической обработки с наложенным адаптивным стробом
Однако яркостного признака для детектирования огня и дыма может быть недостаточно из-за попадания в кадр светлых участков иной природы. Для уменьшения вероятности ложной тревоги имеет смысл учесть динамические признаки. В качестве таких признаков можно использовать изменения формы пламени и дыма, их перемещение и мерцание. В промежутке между двумя последовательными кадрами форма очага возгорания может меняться весьма существенно. Поэтому для корректного детектирования пожара целесообразно сочетать яркостный признак с признаками, относящимися к динамическим изменениях сцены.
Движущиеся области в видеопоследовательности могут быть определены при помощи метода межкадрового вычитания [3, 6]. Элемент изображения (пиксель) с координатами (x, y) в растре относится к движущейся области, если выполняется следующее неравенство:

где It-1(x, y) и It(x, y) – интенсивности пикселя в предшествующем и текущем кадрах видеопоследовательности, δt(x, y) – адаптивное пороговое значение. Найденные пиксели группируются в связные области.
Гораздо проще обнаруживать движение областей по полученным бинарным изображениям видеопоследовательности. На выделенные области накладываются прямоугольные стробы, привязанные к их размерам и местоположению в кадре [7]. Непрерывные вычисления размеров и координат строба на растре и позволяют получить информацию об изменении параметров яркостных зон на изображении. Что, в свою очередь, позволит сформировать сигнал тревоги.
Итак, многошаговый алгоритм обработки видеоизображений включает бинаризацию видеосигналов, морфологическую фильтрацию, формирование адаптивных стробов и регистрацию их размеров и местоположения.
В программное обеспечение комплекса видеомониторинга, кроме программ обработки изображений, входит программа вычисления по координатам стробов в растре географических координат возгорания с учетом параметров видеокамер наблюдения.
Заключение
Обнаружение очага возгорания по видеоизображению имеет ряд преимуществ по сравнению с традиционными методами. Во-первых, к ним следует отнести возможность обнаружения дыма и огня на открытых пространствах, где обычные методы химического анализа бесполезны. Во-вторых, реакция на возникновение опасной ситуации является практически мгновенной: обнаружение огня происходит в момент его возникновения. В-третьих, видео позволяет точно определить месторасположение очага возгорания. В-четвертых, обработка видеоданных в реальном времени позволяет с высокой вероятностью обнаруживать признаки возгорания (дым и огонь) на наблюдаемой сцене даже в условиях тумана или низко стелющихся облаков. В-пятых, несмотря на то, что подавляющее большинство лесных пожаров возникает днем, система позволяет обнаруживать очаг возгорания и в условиях плохой освещенности, так как используемые алгоритмы являются адаптивными и инвариантными к условиям освещенности. Благодаря данной технологии оператор освобождается от необходимости постоянного наблюдения за окружающей обстановкой – система будет автоматически информировать его только о подозрительных ситуациях, требующих его внимания и участия.
Основные преимущества комплекса в целом:
-
Использование существующей инфраструктуры вышек операторов связи и каналов связи, наличие широкого спектра видеокамер различных производителей;
-
Возможность расширения для осуществления централизованного мониторинга больших площадей;
-
Определение точных координат очага возгорания и автоматическое оповещение оператора о возможной опасности.
К достижимым характеристикам комплекса следует отнести радиус обзора местности одной видеокамерой – до 15км; точность определения направления на объект – 0,5 градуса и точность определения местоположения очага возгорания – 250 м.
Литература
1. Системы и технические средства раннего обнаружения пожара // Федоров А.В., Членов А.Н., Лукьянченко А.А. и др. М.: Академия ГПС МЧС России. 2009. 158 с.
2. Шегельман И.Р., Галактионов О.Н., Когочев А.Ю., Попов А.С. Анализ перспективных физических методов обнаружения возгораний / Успехи современного естествознания. – 2016. – № 12. – С. 335–339.
3. Лукьяница А.А. Цифровая обработка видеоизображений / А.А Лукьяница, А.Г. Шишкин. М.: «Ай-Эс-Эс Пресс». 2009. 518 с.
4. Астратов О.С., Смирнов В.М., Филатов В.Н. Обнаружение лесных пожаров по видеоизображениям. Научная сессия ГУАП: сб. докл. СПб.: ГУАП, 2018. С. 7–11.
5. Красильников Н.Н. Цифровая обработка 2D- и 3D-изображений. СПб.: «БХВ-Петербург». 2011. 608 с.
6. Обработка изображений в прикладных телевизионных системах / О.С. Астратов и др. – СПб.: ГУАП, 2012. – 272 с.
7. Смирнов В.М., Филатов В.Н. Формирование адаптивного строба в видеосистемах наблюдения. «Информационно-управляющие системы», № 3, 2006.
Keywords: fire, IP video surveillance, client-server Internet technologies, computer vision, wireless high-speed communication.




