Развитие распределительных сетей и, как следствие, увеличение емкостных токов приводит к все более жестким требованиям к точности настройки компенсации с применением дугогасящих реакторов (ДГР). Установка ДГР в нейтраль распределительной сети и корректная его настройка позволяет повысить надежность электроснабжения потребителей, так как точная компенсация емкостного тока значительно снижает вероятность перехода однофазных замыканий в аварийные режимы, требующие отключения, такие как двух- и трёхфазные короткие замыкания. [1]
Самым распространенным типом ДГР является плунжерный. Он представляет из себя катушку индуктивности с изменяемым воздушным зазором. [2] Такой принцип действия позволяет плавно изменять индуктивность во время настройки, что является основным преимуществом реакторов такого типа. В данной работе речь пойдет только про плунжерные ДГР.
Основным показателем баланса индуктивного и емкостного тока в месте ОЗЗ является расстройка. Равенство амплитуд реактивных токов приводит к резонансу в контуре нулевой последовательности, при этом значение расстройки равняется нулю. Зная значение расстройки и имея плавнорегулируемый ДГР остается лишь воспользоваться автоматикой ДГР для выполнения настройки. Предельно допустимое отклонение расстройки от нуля закреплено в нормативных документах: 5% [3]. Некоторые внутренние документы крупных компаний устанавливают более жесткие требования, вплоть до 1% [4].
Существует несколько групп методов управления компенсацией емкостных токов:
-
Экстремальные методы. Данные методы основаны на поиске пика модуля напряжения нейтрали или нуля фазы напряжения нейтрали. Основная сложность в реализации таких методов состоит в том, что для их работы требуется естественное смещение нейтрали. Кроме того, точность прямо пропорциональна добротности сети.
-
Метод наложения сигнала непромышленной частоты. Данные методы основаны на измерении проводимости контура нулевой последовательности (КНП) на разных частотах. Недостатком данных методов является высокая сложность и стоимость источников, включаемых в нейтраль.
-
Импульсные методы. Данные методы основаны на генерации импульсов с последующим анализом вызванных ими переходных процессов. Недостатком этих методов является дискретность измерения расстройки, а также высокая сложность выполнения анализа переходных процессов в реальном времени.
Вследствие ужесточения требований к точности компенсации токов ОЗЗ появляется необходимость разработки нового алгоритма, лишенного недостатков, описанных выше.
В качестве основы для нового алгоритма, предлагается применить принцип обучения с учителем, заимствованный из машинного обучения. Такой подход позволяет разработать модульную систему, непрерывно определяющую индуктивность в любой момент времени в любом положении плунжера ДГР (рисунок 1).
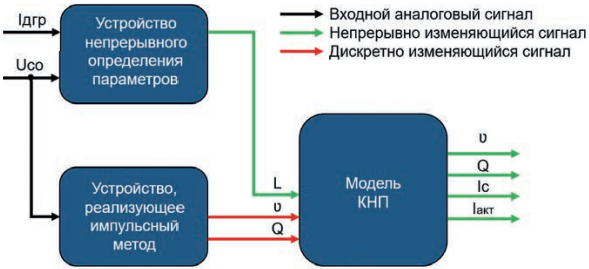
Рисунок 1 – Блок схема комплексного метода:
Iдгр – ток первичной обмотки ДГР;
Uсо – напряжение сигнальной обмотки;
L – индуктивность ДГР;
ʋ - расстройка;
Q – добротность;
Iс – емкостный ток;
Iакт – активная составляющая тока ОЗЗ.
Ключевым звеном разрабатываемого алгоритма является обучаемый модуль, который находится в составе блока устройства непрерывного определения параметров. Он позволяет определить неизвестные параметры КНП путем использования априорной информации о модели КНП, полученной в процессе обучения.
Разрабатываемый алгоритм целесообразно совмещать с активными методами анализа параметров КНП, например, с импульсным методом. Переходный процесс, обусловленный импульсом, позволит комплексному методу получить достаточное количество информации для непрерывного измерения индуктивности.
В настоящее время ведутся работы по внедрению предлагаемых принципов в автоматику ДГР на базе универсальной платформы ТОР-300 производства компании ООО «Релематика». Надежность данной платформы и её соответствие требованиям подтверждены сертификатами соответствия требованиям нормативным документам, а также успешным многолетним опытом эксплуатации. Кроме того, ТОР-300 аттестован в качестве точного средства измерения и внесен в государственный реестр средств измерений под номером №67307-17. Применение данной платформы для реализации метода гарантирует качество получаемых результатов.
Литература:
-
Дементий Ю.А. Методы и средства компенсации полного тока однофазного замыкания на землю в распределительных сетях: дис. … канд. техн. наук. ЧГУ им. Ульянова, Чебоксары, 2018.
-
Соловьёв И.В. Совершенствование управления компенсацией емкостных токов замыкания на землю в распределительных электрических сетях: дис. … канд. техн. наук. ЧГУ им. Ульянова, Чебоксары, 2018.
-
Правила устройства электроустановок. 7-е изд. Утв. Приказом Минэнерго России от 20.05.2003 № 187. -М.: ЭНАС, 2003.
-
СТО 34.01-3.2-008-2017 Реакторы заземляющие дугогасящие 6-35кВ. Общие технические требования. Стандарт организации ПАО «Россети».