

Первые трехмерные (3D) сейсмические съемки на акваториях начали проводиться в конце 70-х годов ХХ века, но долгое время их применение было ограничено несовершенством технологий и высокой ценой проведения полевых наблюдений. Благодаря преимуществам трехмерных данных уже к началу 90-х годов более половины морских разведочных работ проводились по этой методике, что способствовало активному развитию технологий с целью повышения качества и снижения себестоимости работ.
Увеличение объемов разведки и разработки месторождений углеводородов, строительства различных гидротехнических сооружений на шельфе повлекло за собой необходимость проведения изысканий с целью выявления опасных инженерно-геологических явлений и процессов (eng. geohazards) в верхней части донных отложений. Поэтому дальнейшим развитием методик сейсмических наблюдений стали 3D высокоразрешающие системы, основанные на технологиях разведочной сейсморазведки, но с уменьшенным шагом между элементами приемоизлучающего массива. Первые коммерческие работы с ними проводились, например, в конце 1990-х – начале 2000-х годов в Мексиканском заливе компаниями Shell и BP, а также в Северном море. Эти проекты носили единичный характер и только к началу 2010-х годов нефтяные компании начали вновь проявлять интерес к данной технологии в связи с началом бурения в районах со сложными сейсмогеологическими условиями и наличием большого числа опасных инженерно-геологических явлений и процессов [Hill et al., 2015]. Авария платформы Deepwater Horizon в Мексиканском заливе показала, что не стоит пренебрегать проведением детального изучения верхней части геологической среды даже в случае использования полупогружных буровых платформ (ППБУ) [Sack et al., 2012], поэтому в настоящее время наблюдается повышение интереса к высокоразрешающим трехмерным съемкам.
К середине 1990-х годов технический прогресс в области сейсморазведочной аппаратуры позволил начать работы по созданию методик 3D сейсмоакустических наблюдений для изучения верхней части донных отложений с наиболее высокой пространственной и временной разрешающей способностью. Эти технологии нашли применение как при решении прикладных задач, так и при проведении научных исследований.
За последние два десятилетия несколькими научными группами и компаниями были разработаны приемоизлучающие системы, работающие в различных частотных диапазонах. Однако в силу технологических (сложность масштабирования системы), экономических (высокая стоимость оборудования и ограниченный бюджет) и временных (сбор и обработка данных продолжительны во времени) факторов большинство существующих приемоизлучающих систем используется зачастую в научных целях [Шматков, Токарев, 2014].
В настоящей статье приведен обзор существующих 3D сейсмоакустических приемоизлучающих систем и примеров их реального применения в составе инженерно-геологических изысканий, а также научных проектов.
Классификация методик трехмерных сейсмоакустических наблюдений по частотному диапазону
Для изучения верхней части донных отложений наиболее широкое применение нашли высокоразрешающие сейсмические и сейсмоакустические методы. В зарубежной научной литературе [Thomas et al., 2012] сейсмические приемоизлучающие системы, применяемые при проведении морских инженерно-геологических изысканий, принято классифицировать по разрешающей способности и частотному составу записи:
разведочная/нефтегазовая сейсморазведка (eng. conventional/exploration seismic) – 30-75 Гц;
высокоразрешающая сейсморазведка (eng. high resolution seismic, HR) – 80-375 Гц;
сверхвысокоразрешающая сейсморазведка (eng. very high resolution seismic, VHR) – 375-1500 Гц;
ультравысокоразрешающая сейсморазведка (eng. ultra high resolution seismic, UHR) – 1.5-16 кГц.
В технических стандартах (например, OGP, 2011) и публикациях прикладного характера к ультравысокоразрешающим относят методики, работающие в частотном диапазоне свыше 300 Гц, а более высокочастотные системы называют ультра-ультравысокоразрешающими (eng. ultra-ultra high resolution seismic, uUHR).
В отечественной литературе при классификации морских сейсмических наблюдений подчеркивают используемый диапазон частот, поэтому последним двум пунктам соответствуют термины сейсмоакустические (применяются одно- и многоканальные сейсмические косы, а в качестве источника – спаркер, гидро- и пневмопушки) и акустические (бумер, высокочастотный профилограф) наблюдения. Иногда также используют термины низко- и высокочастотное непрерывное сейсмоакустическое профилирование (НСАП).
В работе [Thomas et al., 2012] предлагается классифицировать существующие 3D приемоизлучающие системы в соответствии с частотным составом возбуждаемых колебаний, разрешающей способностью и глубинностью исследований. Ниже авторами приводится список известных на сегодняшний день методик трехмерных сейсмоакустических наблюдений, объединенных в соответствующие группы. Внутри каждой группы приемоизлучающие системы расположены в порядке публикации результатов их применения и года проведения полевых испытаний.
ТАБЛИЦА 1: Существующие системы 3D сейсмоакустических наблюдений на акваториях и их основные характеристики [по Thomas et al., 2012]
|
Система, [разработчик] |
Источник, частотный диапазон |
Число приемников в продольном и поперечном направлении |
Вертикальная и латеральная разрешающая способность |
Площадь и глубинность исследований |
|
Ультравысокоразрешающая сейсморазведка |
||||
|
3D Chirp [1] |
Пьезокерамический [×4] 1,5 – 13 кГц |
10 @ 25 см 6 @ 25 см |
менее 0,1 м / 0,125 м |
менее км2 10 м |
|
Sub-Bottom Imager [2] |
Пьезокерамический [×3] 4 – 14 кГц |
8 @ 40 см 5 @ 10 см |
менее 0,1 м / 0,1 м |
менее км2 10 м |
|
Innomar SES-2000 quattro [3] |
Пьезокерамический [×3] 10 кГц |
3 @ 0,5 м 1 |
менее 0,1 м / 0,33 м |
менее км2 10 м |
|
SEAMAP 3D [4] |
Бумер 4,5 кГц |
8 @ 50 см 4 @ 50 см |
0,1 м / 0,25 м |
менее км2 10 м |
|
Acoustic Corer [2] |
Пьезокерамический [×2] |
1 |
менее 0,1 м / 0,4 м |
100 м2 40 м |
|
Слейпнир [5] |
Пьезокерамический 5-15 кГц |
1 |
менее 0,1 м / 0,25 м |
менее км2 100 |
|
Сверхвысокоразрешающая сейсморазведка |
||||
|
Kite [6] |
Пьезокерамический / пневмопушка 1 – 5 кГц / 200 Гц |
24 @ 2 м 1 |
0,5-2 м / 0,5 м |
несколько км2 100 м |
|
SEISCAT [7] |
Бумер / гидропушка 0,5 – 2 кГц |
12 @ 1 м 1 |
0,2 м / 1 м |
менее км2 10 м |
|
Opus 3D [7] |
Бумер 2 кГц |
8 @ 2 м 2 @ 2 м |
0,2 м / 1 м |
менее км2 10 м |
|
VHR3D [8] |
Спаркер 250 Дж 500 Гц |
4 @ 4 м 6 @ 2 м |
0,75 м / 2 м |
несколько км2 100 м |
|
Fugro [9] |
Бумер 1 – 2 кГц |
4 @ 6,25 м 16 @ 6,25 м |
0,2 м / 3,125 м |
десятки км2 100 м |
|
Португальский институт моря и атмосферы [10] |
Спаркер 2 кДж 1500 Гц |
48 @ 3,125 1 |
0,25 м / 1 м |
десятки км2 100 м |
|
МГУ имени М.В. Ломоносова [11] |
Спаркер 100 Дж 750 Гц |
32 @ 2 м 1 |
0,5 м / 0,5 м |
менее км2 20 м |
|
Высокоразрешающая сейсморазведка |
||||
|
HR3D [8] |
Пневмопушка [×2] 110 Гц |
2 @ 25 м 24 @ 6 м |
3,5 м / 6,25 м |
десятки км2 более 100 м |
|
Университет Лозанны [12] |
Пневмопушка 300 Гц |
3 @ 7,5 м 24 @ 2,5 м |
1,2 м / 3,75 м |
несколько км2 более 100 м |
|
P-Cable 3D [13] |
Пневмопушки 125 Гц |
12-24 @ 12,5 м 8-48 @ 3,125 м |
3 м / 3,125 м |
десятки км2 более 500 м |
|
SoundArray 3D [14] |
Пневмопушки 125 Гц |
18 @ 12,5 м 24 @ 6,25 м |
3 м / 3,125 м |
десятки км2 более 500 м |
|
Gardline [15] |
Пневмопушки 125 Гц |
2-4 @ 12,5-25 м 192 @ 6,25-12,5 м |
3 м / 6,25 м |
десятки км2 более 500 м |
|
BP [16] |
Пневмопушки [×2] 20 – 400 Гц |
2-4 @ 12,5 – 25 м 96-192 @ 6,25 м |
1,5 м / 6,25 м |
десятки км2 300 – 700 м |
Разработчики: [1] Национальный океанографический центр, Саутгемптон (Великобритания), [2] Pangeo Subsea, Сент-Джонс (Канада), [3] Innomar (Германия), [4] Университет имени Христиана Альбрехта, Киль (Германия), [5] Marine Geo Service (Россия), [6] Лаборатория геоакустики университета Майами (США) при участии университета Пай Чай, Тэджон (Республика Корея), [7] Центр по морской геологии университета Гента (Бельгия), [8] Французский научно-исследовательский институт по эксплуатации морских ресурсов (IFREMER), Плузане (Франция), [9] Fugro, Лейдсендам (Нидерланды), [10] Кафедра сейсмометрии и геоакустики Геологического факультета МГУ им. М.В. Ломоносова, Москва (Россия), [11] Португальский институт моря и атмосферы, [12] Университет Лозанны (Швейцария), [13] Университет Осло (Норвегия), [14] Sound Oceanics (США), [15] Gardline Marine Sciences, Норфолк (Великобритания), [16] BP.
Хотя принципы получения трехмерного сейсмического изображения во всех системах схожи, необходимость расположения приемников на очень малых фиксированных расстояниях друг от друга и небольшие глубины буксировки при проведении сейсмоакустических наблюдений требуют очень высокой точности их задания и контроля. Поэтому, в отличие от разведочной 3D сейсморазведки, при проведении наблюдений применяются самые разнообразные конструкции и способы буксировки.
Системы с фиксированным приемоизлучающим массивом
Жесткая рама позволяет расположить приемники и источники в фиксированных положениях и вся конструкция буксируется за судном или с помощью телеуправляемых (ТНПА / ROV) и автономных (АНПА / AUV) необитаемых подводных аппаратов. Это позволяет обеспечить необходимую точность позиционирования отдельных элементов приемоизлучающего массива при работе в высокочастотном диапазоне.
3D Chirp
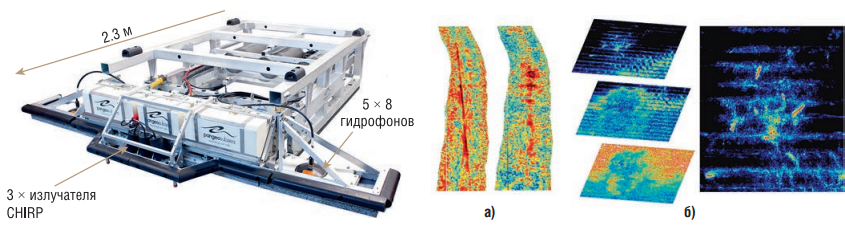
Система, разработанная в Национальном Океанографическом центре Саутгемптона (Великобритания), представляет собой жесткую решетку размером 2 × 2,5 метра, в центре которой закреплены 4 пьезокерамических излучателя, смонтированных в форме мальтийского креста (также авторами предлагаются и другие конфигурации для решения специфических задач). Они генерируют ЛЧМ-сигнал сложной формы в частотном диапазоне от 1,5 до 13 кГц. Регистрация осуществляется цифровой сейсмической станцией, получающей данные от 60 групп приемников (4 гидрофона в группе), расположенных на расстоянии 25 см друг от друга. Для обеспечения высокой точности привязки (сантиметровый диапазон) на углах рамы установлено 4 DGPS-приемника. Оптимальная скорость буксировки системы составляет 2 узла [Bull et al., 2005; Gutowski et al., 2008], а суточная производительность может достигать 0,1-0,2 км2.
Система 3D Chirp использовалась для решения различных задач – поиска погребенного кессона в порту Саутгемптона [Gutowski et al., 2008]; картирования кровли коренных пород и потенциально опасных объектов в толще современных отложений в портовых условиях [Vardy et al., 2008]; для получения сейсмического изображения и картирования оползневых тел и мутьевых отложений [Vardy et al., 2010], а также для решения археологических задач [Plets et al., 2009; Vardy et al., 2011]. Полученные сейсмические кубы имеют размер бина 0,125 × 0,125 или 0,25 × 0,25 метра при средней кратности 15. Максимальная площадь проведенных исследований – 100 × 400 метров.
В настоящее время дальнейшими разработками системы и продажей серийных устройств под брендом «GEOCHIRP 3D» занимается компания Kongsberg Geoacoustics. Для повышения точности определения положения приемоизлучающего массива в пространстве система оснащается гирокомпасом и датчиком динамических перемещений.

Система 3D Chirp. Спуск приемоизлучающей системы в воду (а), положение системы во время проведения съемки (б), схема устройства (в) и пример получаемых данных (г) [по Gutowski et al., 2008]
Sub-Bottom Imager
Система Sub-Bottom Imager (компания PanGeo Subsea, Канада) спроектирована для установки на телеуправляемый необитаемый подводный аппарат рабочего класса (ТНПА) или автономный необитаемый подводный аппарат (АНПА) достаточной грузоподъемности, однако также может быть смонтирована на корпус научно-исследовательского судна. В качестве источника упругих колебаний используется 3 высокочастотных ЛЧМ излучателя с полосой частот от 4 до 16 кГц, а приемные гидрофоны (возможны конфигурации с 24, 40 и 56 приемными элементами) располагаются перпендикулярно направлению съемки, что позволяет получить данные о строении геологической среды в полосе до 5 метров. Для получения информации о пространственном положении приемоизлучающего массива используется высокоточный инерциальный навигационный модуль. При работе с ТНПА скорость съемки может достигать 2 узлов при глубине воды до 1000 метров, а превышение над дном во время регистрации данных должно составлять порядка 3,5 метра [Dinn, 2012]. Суточная производительность достигает 0,6 км2, что является хорошим показателем для подобных систем.
Особенностью обработки получаемых акустических данных является применение алгоритмов фокусировки изображения и синтетической апертуры, что позволяет достигнуть дециметровой разрешающей способности во всех направлениях (размер бина – 10 см). Это позволяет успешно решать задачи идентификации мелкозалегающих объектов (валуны, кабели, трубопроводы, неразорвавшиеся боеприпасы и так далее) и потенциально опасных геологических явлений [Dinn, 2012].
Внешний вид приемоизлучающей системы Sub-Bottom Imager (слева) и пример получаемых данных (справа) [по Dinn, 2012]
Acoustic Corer
Второй приемоизлучающей системой производства компании PanGeo Subsea является Acoustic Corer. Пьезокерамические излучатели (низко- и высокочастотные) располагаются на штанге длиной 12 метров, вдоль которой они могут свободно перемещаться. На противоположной стороне располагается приемная антенна. Система на своеобразном «штативе» устанавливается на дно и стрела приводится в круговое движение. Источники и приемная антенна при этом синхронно перемещаются по штанге, сканируя верхнюю часть донных отложений на глубину до 30-40 метров [Cahill, 2016]. В результате геологическая среда «просвечивается», что позволяет получать данные с высокой разрешающей способностью.
Применение Acoustic Corer возможно не только в комплексе с различными геофизическими методами, но и при геотехнических работах, например статическим зондированием (СРТ). В результате обработки получаемых акустических изображений возможно выделение стратиграфических комплексов, опасных инженерно-геологических явлений и процессов, захороненных объектов (валуны, неразорвавшиеся снаряды и т.п.). Например, система была успешно применена для снижения рисков при установке фундамента ветрогенераторов на шельфе [Cahill, 2016].

Внешний вид приемоизлучающей системы Acoustic Corer (слева) и пример получаемых данных (справа) [по Cahill, 2016]
Innomar SES-2000 quattro
Компания Innomar (Германия) на основе параметрических профилографов собственного производства разработала систему SES-2000 quattro. Четыре приемоизлучающие антенны располагаются на расстоянии 50 см друг от друга на специальной штанге, закрепленной к борту судна. Для адаптации к условиям съемки расстояние между ними может быть изменено. Использование нелинейных сигналов с центральной частотой 4-15 кГц дает возможность сформировать импульс с узкой диаграммой направленности, что в совокупности с высоким разрешением и высокой периодичностью возбуждения импульса позволяет получать детальное изображение верхней части донных осадков [Lowag et al., 2010].
Система применялась для решения инженерно-геологических (съемка перед началом дноуглубительных работ в северной Германии) и археологических задач (было проведено две съемки на площади 130 x 40 метров и 220 x 80 метров) [Lowag et al., 2010]. Размер бина полученных сейсмических кубов был 0,5 x 0,5 метра и 0,33 х 0,33 метра соответственно. Вертикальная разрешающая способность достигала 2 см при центральной частоте 10 кГц. Ввиду небольших линейных размеров системы суточная производительность не превышает 0,1 км2.
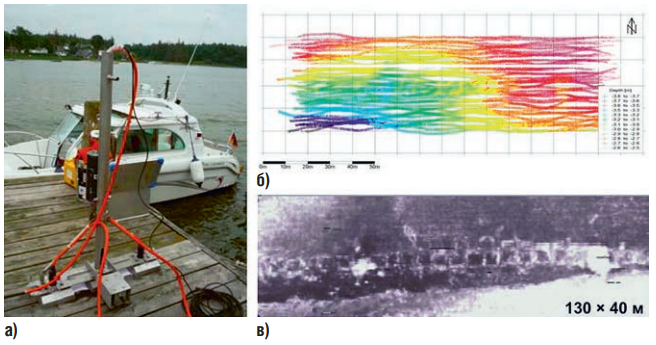
Внешний вид приемоизлучающей системы SES-2000 quattro (слева) и пример получаемых данных (справа) [по Lowag et al., 2010]
SEAMAP 3D
Разработка системы SEAMAP-3D проводилась в университете имени Христиана Альбрехта (Киль, Германия). Приемная система представляет собой жесткую решетку 8 × 4 элементов с шагом 05 метра, в узлах которой закреплены единичные гидрофоны. Буксировка осуществляется самоходным катамараном небольшого размера. Для снижения уровня шумов используются маломощные электродвигатели. Регистрация данных осуществляется с использованием 32-канальной сейсмической станции на базе 24-битного АЦП. В качестве источника упругих колебаний используется излучатель типа «бумер» с полосой частот от 100 Гц до 6 кГц, возбуждающий импульс три раза в секунду. Позиционирование системы осуществляется DGPS-приемником, работающим в режиме кинематики в реальном времени (RTK), установленным непосредственно над источником. Для повышения точности позиционирования используется несколько цифровых компасов [Müller et al., 2009]. Производительность может достигать 0,1 – 0,25 км2/сутки.
Основное применение системы SEAMAP-3D – детальное изучение археологических объектов на мелководных акваториях. Авторы методики успешно выполнили несколько проектов на различных площадках в Германии и Турции [Müller et al., 2009; Müller et al., 2013]. Было получено несколько сейсмических кубов площадью порядка 100 × 150 метров с размером бина 0,25 × 0,25 метра.


Внешний вид приемоизлучающей системы SEAMAP-3D (слева) и схема (справа) [по Müller et al., 2009]
Слейпнир
Сотрудниками компании Marine Geo Service (ООО «МГ-Сервис», Россия) разработан и испытан прототип многофункциональной самодвижущейся платформы «Слейпнир» для проведения трехмерных сейсмоакустических наблюдений с использованием параметрического профилографа SES-2000. Платформа «Слейпнир» состоит из рамы (ширина 2,4 м, длина 2,7 м), на которой установлены 4 колесные пары с движителями, электроника в герметичных боксах и система электропитания; вертикальной рамы для размещения электроники в брызгозащитном боксе (опционально); ферменной конструкции длиной 5,5 м для движения каретки с антенной профилографа. Для передачи энергии и обмена данными с платформой используются стандартные компоненты телеуправляемого необитаемого подводного аппарата (ТНПА) МСС-350. Оператор в реальном времени контролирует все движения платформы и каретки по данным телеметрии, а также при помощи визуального контроля с использованием подводной Full-HD камеры. Максимальная рабочая глубина системы – 1000 метров.
Съемка проводится в старт-стопном режиме: после установки платформы в заданную точку по команде оператора каретка с приемоизлучающей антенной начинает движение и проводится сканирование вдоль линии длиной 5 метров. После этого производится смещение платформы вдоль линии профиля на расстояние 0,2-0,25 м. Обработка позволяет получить сейсмический куб, временные разрезы и временные срезы среднеквадратичных амплитуд, на которых возможно выявление локальных объектов размером от 20 см.
Опытно-методические работы в условиях мелководной акватории (1 – 3 м) проводились в летний сезон 2016 года в рамках научно-исследовательской деятельности подводного отряда Фанагорийской экспедиции Института археологии РАН. Позиционирование и местоопределение приемоизлучающей антенны профилографа осуществлялось с использованием дифференциального ГНСС-приемника Trimble SPS 461 в режиме RTK. Антенна была закреплена непосредственно над антенной профилографа, что позволило обеспечить субдециметровую точность. В результате проведенных работ был получен сейсмический куб размером 30 × 5 м с размером бина 0,25 × 0,25 метра. Экспресс-анализ данных позволил выделить аномальный объект в верхней части донных отложений, что было подтверждено визуальным осмотром в процессе размыва грунта водолазами.
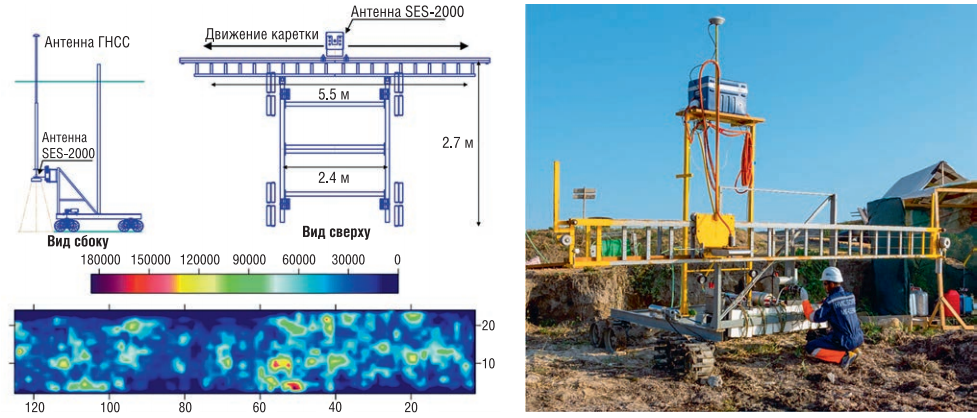
Схема и внешний вид приемоизлучающей системы «Слейпнир», пример временного среза сейсмического куба
Kite
Одна из первых приемоизлучающих систем для проведения трехмерных сейсмоакустических наблюдений – Kite – была разработана в лаборатории геоакустики университета Майами (США) при участии университета Пай Чай (Тэджон, Республика Корея). Для регистрации упругих колебаний используется сейсмическая станция на базе 12-битного АЦП, получающая данные от 24 гидрофонов, расположенных на жесткой раме через 2 метра в направлении поперечном движению судна. В качестве источника упругих колебаний применяется либо широкополосная пневматическая пушка с центральной частотой около 200 Гц, либо пьезокерамический источник с полосой частот от 1 до 5 кГц, излучающий сигнал в псевдослучайном коде для увеличения отношения сигнал/шум. Скорость судна во время съемки может варьироваться от 2 до 5 узлов, а географическая привязка осуществляется с использованием DGPS-приемника [Rogers et al., 1993].
Система была разработана преимущественно для проведения региональных исследований на континентальном шельфе и ее испытания происходили на восточном побережье Северной Америки [Rogers et al., 1993]. О дальнейшем использовании системы неизвестно, что может быть следствием ее недостатков – жесткая конструкция с большими линейными размерами требует привлечения специализированного судна с грузоподъемными механизмами, а максимальное удаление, равное 46 метрам, не позволяет проводить работы на глубинах менее 15-20 метров. В то же время система характеризуется хорошей производительностью – 3-4 км2/сутки.
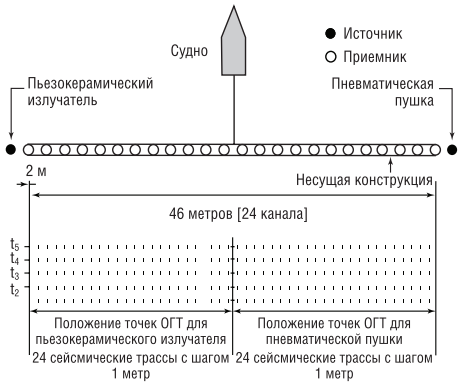
Схема системы Kite [по Rogers et al., 1993]
SEISCAT
В начале 90-х годов ХХ века разработки трехмерных систем для высокоразрешающих наблюдений начались в университете Гента (Бельгия). В рамках нескольких международных научно-исследовательских проектов была разработана система SEISCAT. Приемная часть состоит из 12 одноканальных кос, которые установлены через 1 метр на легком катамаране, буксируемом судном. В качестве источника используется гидропушка объемом 15 дм3 или излучатель типа «бумер», обеспечивающие излучение сигнала в полосе до 2 кГц с центральной частотой около 1000 Гц. Географическая привязка осуществляется с помощью автоматического лазерного теодолита, установленного на берегу, и отражающей призмы на катамаране. Координаты, определенные с точностью до нескольких сантиметров, передаются на борт по радиоканалу в реальном времени [Henriet et al., 1992]. Суточная производительность может достигать 0,75 км2.
Апробация системы проводилась на реке Шельда, где был получен сейсмический куб площадью 50 × 180 метров с размером бина 1 × 1 метр и средней кратностью 5 для изучения глиняного диапира диаметром около 60 метров [Henriet et al., 1992; Versteeg et al., 1992].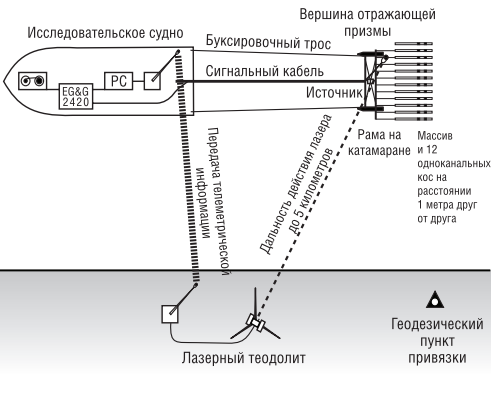
Схема системы SEISCAT [по Henriet et al., 1992]
Opus 3D
Дальнейшим
развитием методики SEISCAT
стало создание системы Opus3D,
приемный массив которой составлен из
8 двухканальных сейсмических кос.
Расстояние между каналами и между косами
одинаково и равно 2 м. Каждый канал в
свою очередь содержит два гидрофона на
расстоянии 25 см. Для буксировки
используются специально разработанные
надувные модули, закрепленные на лодке,
которая также является носителем
источника. В качестве источника
используется излучатель типа «бумер»
с центральной частотой около 2 кГц и
полосой частот от 1 до 3 кГц. Позиционирование
осуществляется с использованием
DGPS-приемников, работающих в режиме
кинематики в реальном времени (RTK).
Система может использоваться как
самостоятельно – в этом случае лодка
является носителем, так и в буксируемом
варианте. Испытания системы также
проводились в речных условиях над
глиняным диапиром, и был получен
сейсмический куб площадью 50 × 150 метров
с размером бина 1 × 1 метр. Глубинность
исследований составила порядка 50 метров
ниже уровня дна [Missiaen, 2005]. Суточная
производительность – 1-1,5 км2.
Схема (а), внешний вид (б) системы Opus3D и пример полученных данных (в) [по Missiaen, 2005]
Аквасвип-3Д
Аналогичный сейсмоакустический комплекс, состоящий из 8 двухканальных кос, разрабатывался в начале 2000-х годов в государственном научном центре Южморгеология (Геленджик, Россия) и получил название Аквасвип-3Д. В качестве источника предлагалось использовать пьезокерамический излучатель. Буксировка приемных элементов должна была осуществляться с использованием несамоходного катамарана. Однако в литературных источниках информации о реальном использовании комплекса и полученных результатах обнаружить не удалось.
Системы, буксируемые на выстрелах
В этом случае сейсмические косы крепятся к специальным штангам, располагающимся перпендикулярно корпусу судна. Подобные устройства часто являются штатным судовым оборудованием, либо могут быть быстро изготовлены и смонтированы на любое судно, что делает этот способ буксировки универсальным.
VHR3D/ HR3D
Во Французском научно-исследовательском институте по эксплуатации морских ресурсов (IFREMER) (Плузане, Франция) в начале 2000-х годов были разработаны системы HR3D и VHR3D, предназначенные для получения сейсмического изображения геологической среды с вертикальным разрешением 1 метр и проведения инженерных изысканий на небольших площадях с глубинами моря до 100 метров. Были испытаны несколько разных конфигураций данной системы. Для достижения заданной разрешающей способности и частотного состава записи в качестве источника используются излучатели типа «спаркер», либо пневматические пушки Mini G.I. Навигация и определение координат осуществляется при помощи DGPS-приемников, установленных на судне и на источнике, а для повышения точности позиционирования сейсмических кос применяются цифровые компасы. В различных конфигурациях производительность системы варьируется от 1 до 3,5 км2, но при этом размер бина больше (от 2 до 6,25 м), чем у рассмотренных выше систем с фиксированным приемоизлучающим массивом [Marsset et al., 2002; Thomas et al., 2004].
В статье [Marsset et al., 2002] представлены результаты применения системы для изучения осадков с высоким контрастом литологических свойств, разломной зоны, а также изучения неконсолидированных секвенций песка и глины в речных отложениях. Для возбуждения упругих колебаний использовался источник типа «спаркер» с центральной частотой 600 Гц. Для регистрации использовались 4 6-канальные сейсмические косы (шаг 1 метр между каналами), которые буксировались на расстоянии 4 метров друг от друга.
На
площадке возле острова Корсика
(Средиземное море) использовалась
конфигурация системы с одной сейсмической
косой (48 каналов, расстояние между
каналами 6,25 метра) и двумя излучателями
типа «спаркер», разнесенных на 15 метров
друг от друга. В Норвежском море для
получения сейсмического куба использовалось
две сейсмические косы (48 каналов,
расстояние между каналами 6,25 метра),
разнесенные на 25 метров, и две пневматические
пушки типа Mini G.I., разнесенные на 12,5
метра. Аналогичная система применялась
для изучения мелкомасштабных сложно
построенных осадков на шельфе
Адриатического шельфа. Во время проведения
этих исследований также использовалась
конфигурация с 4 косами, описанная выше.
Конфигурации приемоизлучающей системы института IFREMER [по Marsset et al., 2004; Thomas et al., 2004] МГУ имени М.В.Ломоносова
На кафедре сейсмометрии и геоакустики геологического факультета МГУ была разработана и опробована летом 2014 г. на акватории Белого моря относительно простая система для трехмерных сейсмоакустических наблюдений [Шматков, Токарев, 2014].
Приемная
часть системы состоит из двух 16-канальных
аналоговых сейсмических кос, буксируемых
с двух выстрелов длиной около 4,5 м,
расположенных по бортам судна. Это
обеспечивает разнос первых каналов
сейсмических кос на 12 м друг от друга.
Для получения необходимой формы приемной
системы хвостовые части кос соединяются
вместе, образуя при буксировке форму,
хорошо аппроксимируемую цепной линией.
Для возбуждения упругих колебаний
используется излучатель типа «спаркер»
с центральной частотой 750 Гц. Схема
взаимного расположения элементов
приемоизлучающей системы во время
проведения полевого эксперимента
показана на рисунке. Навигационная
привязка осуществлялась при помощи
дифференциального ГНСС-приемника C-Nav
3050 с сервисом спутниковых поправок, что
позволило достичь дециметровой точности
определения координат. Дальнейший
расчет координат элементов приемоизлучающего
массива осуществлялся в специализированном
программном обеспечении. Работоспособность
системы демонстрируется полученным в
результате проведенной обработки данных
сейсмоакустическим кубом с размерами
бина 0,5×0,5 м [Шматков, Токарев, 2014].
Схема приемоизлучающей системы, разработанной в МГУ им. М.В. Ломоносова (а), и пример полученных данных – фрагмент 3D куба (б) и временные срезы сейсмического куба (в) [Шматков, Токарев, 2014]
Университет Лозанны
Для проведения высокоразрешающих трехмерных сейсмических наблюдений в озерных условиях в университете Лозанны (Швейцария) была разработана приемоизлучающая система, основанная на 3 твердотельных 24-канальных сейсмических косах (шаг 2,5 метра между каналами). Регистрация данных осуществляется сейсмической станцией на базе 24-разрядного АЦП. Одна из кос буксируется непосредственно за судном, две остальные – на боковых выстрелах длиной 5-7,5 метра. Для стабильности заглубления кос на концах выстрелов закреплены небольшие плоты. Возбуждение упругих колебаний осуществляется при помощи пневматической пушки Mini G.I. с системой подавления вторичных пульсаций воздушной полости. Центральная частота сигнала в описанном авторами эксперименте составляла 330 Гц при полосе частот от 40 до 650 Гц. Позиционирование всей системы осуществлялось при помощи DGPS-приемников, работавших в режиме кинематики реального времени, антенны которых были установлены на судне и вблизи хвостовой части кос, что позволило определить координаты всех элементов приемоизлучающей системы с точностью ±0,05 метра. При скорости судна в 2 узла достигается производительность 0,75 – 1,5 км2/сутки [Scheidhauer et al., 2005].
Система была
успешно испытана в Женевском озере, где
коллективом авторов [Scheidhauer et
al., 2005] проводилось изучение
сложнопостроенной разломной зоны. В
результате проведенных исследований
был получен сейсмический куб площадью
600 × 1500 метров с размером бина 3,75 × 1,25
метра и номинальной кратностью 6.
Максимальная глубинность, достигнутая
при проведении полевых работ, составила
300 м ниже поверхности дна.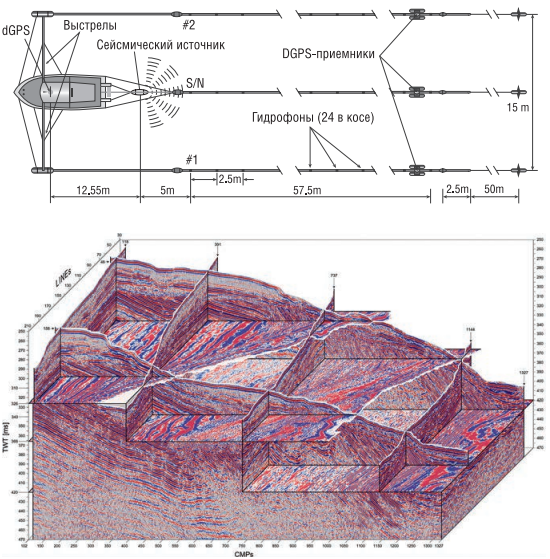
Схема системы, разработанной в университете Лозанны: вид сверху и пример полученных данных [по Scheidhauer et al., 2005]
Системы, буксируемые при помощи параванов
Параваны – специальные устройства, предназначенные для отведения сейсмического оборудования в сторону от курса судна. Они позволяют буксировать сейсмические косы на значительном удалении от судна и отводить их в сторону от линии профиля. Наиболее широко этот способ применяется при проведении разведочной трехмерной сейсморазведки. Этот способ буксировки наиболее удобен при проведении относительно низкочастотных наблюдений с приемоизлучающими системами, распределенными в пространстве на первые сотни метров.
Системы на основе оборудования для проведения разведочной 3D сейсморазведки
Поскольку этот способ, как отмечалось выше, является стандартным для проведения разведочной трехмерной сейсморазведки, то первые высокоразрешающие наблюдения начали проводить, адаптируя имеющееся оборудование к новым задачам. Одна из первых подобных методик была опробована компанией Total в Северном море. Для достижения необходимой пространственной разрешающей способности расстояние между косами, их длина и количество было уменьшено. Затем похожие технологии использовались компаниями Shell, Vastar и BP в акватории Мексиканского залива [Hill et al., 2015].
В 2004 году в акватории Каспийского моря по заказу компании BP проводились комплексные инженерные изыскания и в их состав входила трехмерная высокоразрешающая сейсморазведка. Приемоизлучающая система состояла из 4 сейсмических кос и 2 групп пневматических источников. В 2013 году подобные исследования проводились на месторождении Азери-Чираг-Гюнешли (Азербайджан, Каспийское море) с применением 6 сейсмических кос и двух групп источников [Hill et al., 2015].
В 2013 году компания также проводила сверхвысокоразрешающие сейсмические наблюдения в Норвежском море с целью получения детального изображения верхней части разреза (300 метров ниже уровня дна) при глубине воды порядка 70 метров. При проведении съемки использовалось 2 сейсмические косы (шаг между каналами 6,25 метра) с расстоянием 25 метров между ними и два источника на расстоянии 12,5 метра. В результате был получен сейсмический куб с размером бина 3,125 × 6,25 метра, что позволило идентифицировать палеоканалы шириной менее 50 метров, а также выделить слои внутри них и восстановить историю движения ледников в районе исследований [Hill et al., 2015]. Аналогичные исследования проводились в 2014 году в английском секторе центральной части Северного моря.
Помимо описанных выше методик существуют разработки коммерческих компаний, занимающихся проведением инженерно-геологических изысканий. Однако получение актуальной информации затруднено в связи с защитой ими своих коммерческих интересов. Из открытых источников известно, например, что компания Fugro проводила изыскания с применением четырех 16-канальных сейсмических кос длиной 50 метров, буксировавшихся на расстоянии 6,25 метра друг от друга. В качестве источника применялась группа излучателей типа «бумер».
Компания Gardline при проведении инженерно-геологических изысканий использует систему трехмерных высокоразрешающих сейсмических наблюдений, построенную на базе четырех сейсмических кос длиной 600 метров с расстоянием между ними, равным 12,5 метра, либо двух кос длиной 1200 метров и расстоянием 25 метров между ними. В качестве источника используется одна или две группы пневматических пушек небольшого объема [Games, Wakefield, 2014]. Производительность всех описанных выше систем составляет порядка 1,75 – 3,5 км2/сутки.
Португальский институт моря и атмосферы
В португальском
институте моря и атмосферы была испытана
приемоизлучающая система, состоящая
из двух многоканальных сейсмических
кос, буксируемых за судном в форме буквы
«V». Оголовья кос отводятся
от осевой линии судна с использованием
параванов. Для поддержания геометрии
в хвостовой части кос располагается
концевой буй. Положение элементов
приемоизлучающего массива определяется
с помощью DGPS-приемников.
Данная методика с использованием
излучателя упругих колебаний типа
«спаркер» с центральной частотой
1200-1500 Гц позволяет получать сейсмические
изображения с горизонтальным разрешением
1 метр и вертикальным разрешением 15 см
[Noiva et al.,
2014].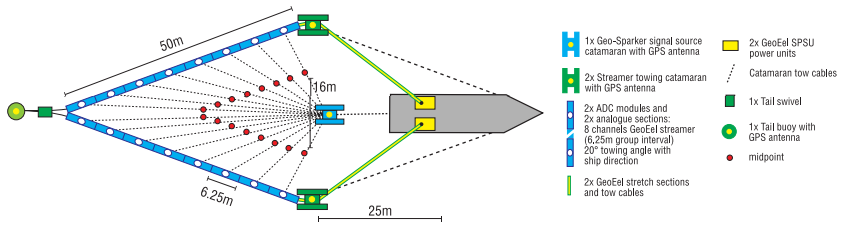
Схематический вид системы, разработанной в португальском институте моря и атмосферы [по Noiva et al., 2014]
Опытно-методические работы проводились в рамках проекта по изучению оползней, вызванных землетрясениями и цунами в дельте реки Тагус (Португалия).
P-Cable 3D
Система P-Cable 3D была разработана компанией Volcanic Basin Petroleum Research при участии университета Тромсе (Норвегия) и Национального Океанографического центра Саутгемптона (Великобритания) в рамках программы HERMES по изучению высокотемпературных экосистем активных окраин европейских морей [Planke et al., 2009]. В настоящее время система активно развивается при участии производителя сейсмического оборудования – Geometrics (США) [Ebuna et al., 2013].
Основой системы P-Cable 3D является так называемый перпендикулярный кабель, буксируемый за судном. Кабель растягивается двумя параванами и к нему подключается от 12 до 24 твердотельных сейсмических кос с расстоянием 12,5 или 6,25 метра. В стандартной конфигурации каждая коса содержит в себе 8 каналов с шагом 3,125 метра, однако на практике могут применяться более длинные косы – до 100 метров (32 канала). Регистрация сейсмических данных осуществляется с использованием 8-канальных цифровых модулей на базе 24-разрядных АЦП. В качестве источника используются группы пневматических пушек Mini G.I. с центральной частотой от 100 до 250 Гц и полосой частот до 1000 Гц. Также проводились работы с использованием группы излучателей типа «бумер». Позиционирование системы осуществляется с использованием DGPS-приемников, закрепленными на пушке, параванах и судне [Planke et al., 2009; Ebuna et al., 2013; Lippus, 2014]. Для повышения точности определения координат приемных каналов также могут применять цифровые компасы, установленные в оголовье и в хвостовой части сейсмических кос.
Система
P-Cable 3D неоднократно использовалась для
изучения опасных инженерно-геологических
процессов и явлений [Ebuna et al., 2013; Шматкова
и др., 2015], для изучения газовых каналов,
скоплений приповерхностного газа на
шельфе Баренцева моря [Plaza-Faverola
et al., 2011] и изучения газовых гидратов
[Buenz et al., 2012]. В последние годы значительно
возросло число коммерческих проектов,
выполнявшихся с использованием системы
P-Cable 3D,
в области инженерно-геологических
изысканий. Полученные кубы имеют среднюю
площадь 10-50 км2
[Planke et al.,
2009], а максимальная площадь исследований
составляет 250 км2.
Стандартный размер бина равен 6,25 × 6,25
метра. При выполнении детальных работ
он может быть уменьшен до 3,125 × 3,125 метра.
Суточная производительность (в зависимости
от конфигурации) варьируется от 5 до 20
км2/сутки.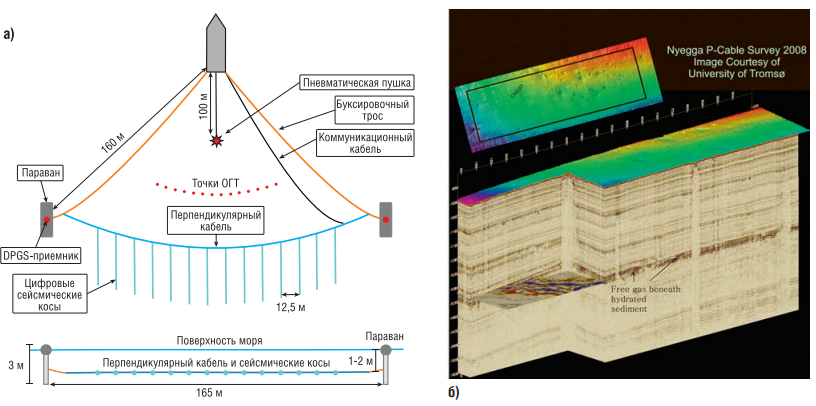
Схема системы P-Cable 3D (а) [Шматков и др., 2015] и пример полученных данных [Eriksen et al, 2011]
SoundArray 3D
Система SoundArray 3D компании Sound Oceanics во многом повторяет концепцию P-Cable 3D. Твердотельные сейсмические косы производства компании Hydroscience Technologies также буксируются на перпендикулярном кабеле, который растягивается двумя параванами. Расстояние между косами может составлять 6,25, 12,5 и 25 метров. Для навигационной привязки используются дифференциальные DGPS-приемники и система акустического позиционирования [Sack et al., 2012].
Для выполнения
тестовых работ в Норвежском море по
данной методике в 2011 году использовалось
двадцать 24-канальных сейсмических кос
длиной 150 метров. Расстояние между косами
было равно 12,5 метра, а в качестве
источников использовались пневматические
пушки. Также были проведены работы возле
побережья Японии с системой из 18
сейсмических кос [Shigeru et
al., 2016].
Схема
системы SoundArray 3D
(слева) и пример полученных данных
(справа)
Выводы
Трехмерные сейсмоакустические системы наблюдений позволяют получать объемное сейсмическое изображение верхней части донных отложений и мелкомасштабных объектов. Поскольку многие опасные инженерно-геологические явления и процессы, влияющие на безопасность установки и эксплуатации гидротехнических сооружений, имеют площадной характер распространения и залегают ниже поверхности дна, то при проведении изысканий необходимо применять трехмерные сейсмоакустические методы в совокупности с другими видами инженерно-геологических исследований.
Необходимость высокоточного позиционирования элементов приемоизлучающего массива как по вертикали, так и по горизонтали приводит к усложнению способов буксировки и накладывает определенные ограничения при проведении полевых работ. Эти факторы в совокупности с экономическими причинами ограничивают применение трехмерных сейсмоакустических наблюдений при проведении морских инженерно-геологических изысканий.
Наиболее высокочастотные системы с жестко закрепленным приемоизлучающим массивом обладают максимальным разрешением по вертикали и горизонтали, но их суточная производительность не превышает 0,1 км2, вследствие чего они эффективны только для решения узкоспециализированных локальных задач. Более низкочастотные системы обеспечивают среднюю производительность до 0,75 – 1,5 км2/сутки, однако они слабо приспособлены к работе в условиях открытой морской акватории.
Буксировка с использованием выстрелов является наиболее универсальным способом, но ширина полосы покрытия не превышает первых десятков метров, что в совокупности с большим расстоянием между приемными элементами приводит к ухудшению горизонтальной разрешающей способности. Производительность может варьироваться от 0,75 до 3,5 км2/сутки.
При буксировке приемоизлучающей системы с использованием параванов удается достигнуть максимальной ширины полосы покрытия, при этом количество кос и расстояние между ними может варьироваться в широких пределах, что позволяет адаптировать систему для решения большого числа различных задач и повысить производительность до 5 – 20 км2/сутки.
Литература:
- Hill, A.W. Slicing and dicing HR seismic acquisition: Varied approaches to delivery of high-resolution 3D seismic data volumes for drilling-hazard studies / A.W. Hill, A. Arogunmati, G.A. Wood [et al.] // The Leading Edge. – 2015. – Vol. 34, N 4. – pp. 380 – 388.
- Sack, P. A New System for Three-Dimensional HighResolution Geophysical Surveys / P. Sack, T. Haugland, G. Stock // Marine Technology Society Journal. – 2012. – Vol. 46, N 4. – pp. 33 – 39.
- Шматков, А.А. Новая методика трехмерных сейсмоакустических наблюдений на мелководных акваториях / А.А. Шматков, М.Ю. Токарев // Экспозиция Нефть Газ. – 2014. – № 6. – С. 39 – 42.
- Thomas, Y. Contribution of high-resolution 3D seismic near-seafloor imaging to reservoir-scale studies: application to the active North Anatolian Fault, Sea of Marmara / Y. Thomas, B. Marsset, G.K. Westbrook [et al.] // Near Surface Geophysics. – 2012. – Vol. 10. – pp. 291 – 301.
- Bull, J.M. Design of a 3D Chirp sub-bottom imaging system / J.M. Bull, M. Gutowski, J.K. Dix [et al.] // Marine Geophysical Researches. – 2005. – Vol. 26. – pp. 157–169.
- Gutowski, M. 3D high-resolution acoustic imaging of the sub-seabed / M. Gutowski, J.M. Bull, J.K. Dix [et al.] // Applied Acoustics. – 2008. – Vol. 69. – pp. 412 – 421.
- Vardy, M.E. Decimeter-resolution 3D seismic volume in shallow water: A case study in small-object detection / M.E. Vardy, J.K. Dix, T.J. Henstock [et al.] // Geophysics. – 2008. – Vol. 73, N 2. – pp. 33 – 40.
- Plets, R.M.K. The use of a high-resolution 3D Chirp sub-bottom profiler for the reconstruction of the shallow water archaeological site of the Grace Dieu (1439), River Hamble, UK / R.M.K. Plets, J.K. Dix, J.R. Adams [et al.] // Journal of Archaeological Science. – 2009. – Vol. 36. – pp. 408 – 418.
- Vardy, M.E. The geological Hubble: A reappraisal for shallow water / M.E. Vardy, J.M. Bull, J.K. Dix [et al.] // The Leading Edge. – 2011. – Vol. 30, N 2. – pp. 154 – 159.
- Dinn, G. Field experience with a new sub-bottom investigation tool: Acoustic 3-D imaging of the subseabed // Proc. of Oceans Conference. – Hampton Roads, 2012. – 9 p.
- Cahill, M. De-risking installation of offshore wind turbine foundations in complex geology at the block island wind farm using an acoustic corer // Proc. of AWEA 2016 Conference. – Warwick, 2016. – 1 p.
- Lowag, J. Three-Dimensional Investigation of Buried Structures with Multi-Transducer Parametric Sub-Bottom Profiler as part of Hydrographical Applications / J. Lowag, J. Wunderlich, P. H mbs // Proc. of HYDRO 2010 Conference. – Rostock-Warnem nde, 2010. – 8 p.
- M ller, C. Ultra-high-resolution marine 2D–3D seismic investigation of the Liman Tepe/Karantina Island archaeological site (Urla/Turkey) / C. M ller, S. Woelz, Y. Ersoy [et al.] // Journal of Applied Geophysics. – 2009. – Vol. 68. – pp. 124-134.
- M ller, C. High-Resolution 3D Marine Seismic Investigation of Hedeby Harbour, Germany / C. M ller, S. Woelz, S. Kalmring // International Journal of Nautical Archaeology. – 2013. – Vol. 42, N 2. – pp. 326-336.
- Шматков, А. Опыт применения данных трехмерной съемки параметрическим профилографом для решения археологических задач в мелководной части Таманского залива / Шматков А.А., Ольховский С.В., Верхняцкий А.А. // Тезисы конференции «Морские исследования и образование: MARESEDU-2016». – Москва, 2016. – C. 1 – 3.
- Rogers, A. The High Resolution 3-D Seismic Survey System “Kite”/ A. Rogers, T. Yamamoto, H. Shon [et al.] // Proc. of SEG Annual Meeting. – Washington, 1993. – pp. 531 – 535.
- Henriet, J.-P. Very high resolution 3D seismic reflection imaging of small-scale structural deformation / J.-P. Henriet, M. Verschuren, W. Versteeg // First Break. – 1992. – Vol. 10, N 3. – pp. 81 – 88.
- Versteeg, W. High-Resolution 3D and Pseudo-3D Seismic Investigations in Shallow Water Environments / W. Versteeg, M. Verschuren, J.-P. Henriet [et al.] // Proc. of European Conference on Underwater Acoustics. – Luxembourg, 1992. – pp. 497 – 500.
- Missiaen, T. VHR marine 3D seismics for shallow water investigations: Some practical guidelines // Marine Geophysical Researches. – 2005. – Vol. 26. – pp. 145 – 155.
- Marsset, T. Sismique tr s haute r solution 3D: une nouvelle m thode d’imagerie des sols superficiels / T. Marsset, B. Marsset, Y. Thomas [et al.] // Comptes Rendus Geoscience. – 2002. – Vol. 334. – pp. 403 – 408.
- Marsset, T. Analysis of Holocene sedimentary features on the Adriatic shelf from 3D very high resolution seismic data (Triad survey) / T. Marsset, B. Marsset, Y. Thomas [et al.] // Marine Geology. – 2004. – Vol. 213. – pp. 73 – 89.
- Thomas, Y. Sismique marine haute r solution 3D: un nouvel outil de reconnaissance destination de la communaut scientifique / Y. Thomas, B. Marsset, S. Didailler [et al.] // Comptes Rendus Geoscience. – 2004. – Vol. 336. – pp. 579 – 585.
- Scheidhauer, M. Development of a system for 3D high-resolution seismic reflection profiling on lakes / M. Scheidhauer, F. Marillier, D. Dupuy // Marine Geophysical Researches. – 2005. – Vol. 26. – pp. 183–195.
- Games, K.P. The Successful Design, Development and Acquisition of a UHRS 3D Seismic Dataset / K.P. Games, N.D. Wakefield // Proc. of First Applied Shallow Marine Geophysics Conference. – Athens, 2014. – 5 p.
- Noiva, J. TAGUSDELTA Cruise Final Report / J. Noiva, P. Terrinha, P. Brito. - IPMA, 2014. – pp. 1 – 36.
- Planke, S. P-Cable High-Resolution Seismic / S. Planke, F. Eriksen, C. Berndt [et al.] // Oceanography. – 2009. – Vol. 22, N 1. – p. 85.
- Ebuna, D.R. High-resolution offshore 3D seismic geophysical studies of infrastructure geohazards / D.R. Ebuna, T.J. Mitchell, P.J. Hogan [et al.] // Proc. of SAGEEP Conference and Exhibition 2013. – Denver, 2013. – 10 p.
- Lippus, C. High-resolution revolution // Oilfield Technology. – 2014. – Vol. 7, N 6. – pp. 56 – 62.
- Шматкова, А.А. Пример выделения опасных геологических объектов по данным морских высокоразрешающих трехмерных сейсмических наблюдений в Норвежском море / А.А. Шматкова, А.А. Шматков, В.Г. Гайнанов [и др.] // Вестник Московского Университета, Серия 4, Геология. – 2015. – № 1. – C. 55 – 62.
- Plaza-Faverola, A. Repeated fluid expulsion through sub-seabed chimneys offshore Norway in response to glacial cycles / A. Plaza-Faverola, S. Buenz, J. Mienert // Earth and Planetary Science Letters. – 2011. – Vol. 305. – pp. 297 – 308.
- Buenz, S. P-Cable High-Resolution 3D Seismic Imaging of Hydrate Occurrences Over Unusually Large Gas Chimneys in the SW Barents Sea / S. Buenz, S. Vadakkepuliyambatta, J. Mienert [et al.] // NETL Fire in the Ice newsletter. – 2012. – Vol. 12, N 2. – pp. 10 – 13.
- Shigeru, I. High-Resolution 3D Reflection Seismic Survey (SoundArray 3D) Off Joetsu, Niigata Prefecture, Japan / I. Shigeru, K. Hidekuni, A. Eiichi [et al.] // Proc. of SEGJ Conference 2016. – Muroran, 2016. – 4 p.




