Одним из перспективных направлений по решению столь интересной задачи, рассматривается
многофункциональность и модульность конструктивного исполнения и программного обеспечения морской робототехники. При этом вполне законен вопрос: в чем новизна такого подхода? Хорошо известны решения ведущего мирового производителя морской робототехники “Teledyne Technologies Company”, автономные необитаемые подводные аппараты (АНПА) “GAVIA” компании “Teledyne Gavia ehf”, которые является эталоном модульности и многофункциональности. Они не только позволяет варьировать модули различных полезных нагрузок (камеры, гидролокаторы, профилографы, лаги, датчики и имитаторы акустических целей), но и в зависимости от полезной нагрузки и задачи подбирать необходимую конфигурацию базовых модулей, при этом используя единый интерфейс для нескольких беспилотных платформ и датчиков при планировании и анализе миссий. Более распространенным является решение применения модульности только к полезной нагрузке морской робототехники. Его использовала и компания “OceanServer Technology Inc.” в серии АНПА “IVER”, а также данное решение применено в ведущейся, по Европейской программе “Horizon 2020”, разработке глубоководного (5 000 м) автономного необитаемого подводного аппарата с гидродинамическими принципом движения “BRIDGES”. Ответ на вопрос, при всех приведенных примерах, прост – везде использована модульность исключительно в рамках одной модели или максимум нескольких моделей одного типа изделия. В отличие от этого, в предлагаемом направлении многофункциональности и модульности конструктивного исполнения и программного обеспечения морской робототехники, изначально заложен комплексный подход к созданию не одной модульной модели или типа морской робототехники, а концепция формирования типорядов модулей полезной нагрузки и базовых функций для самостоятельного формирования пользователем необходимого типа и необходимой конфигурации морского робототехнического средства – АНПА, АНПА – П традиционного или гибридного типа, телеуправляемого аппарата, донной станции или поверхностного без-экипажного плавсредства или волнового планера. Естественно, даже самый полный типоряд модулей не сможет удовлетворить всему многообразию задач, но, если даже для половины всех имеющихся типовых задач, то куммулятивный эффект от экономии на разработке, доводке, испытаниях, серийности продукции, загрузки производителей комплектующих и полезной нагрузки, объемах ЗИП для пользователя, подготовке техников и операторов, технологической проработке морских операций оценивается в миллиардах рублей. Так стоимость разработки и изготовления только 1 единицы морской робототехники согласно Государственной закупке - 249 508 000 рублей. Верификацией верности выбранного направления служит признание работы «Разработка модульно-унифицированного семейства автономных подводных аппаратов как элементов мультиагентной подводной робототехнической системы для Арктического региона» лауреатом «Международного конкурса научных, научно-технических и инновационных разработок, направленных на развитие и освоение Арктики и континентального шельфа 2017 г.».
Концепция многофункциональности и модульности конструктивного исполнения и программного обеспечения морской робототехники реализуется АО «НПП ПТ «Океанос» в практической деятельности в совместных с ФГБОУ ВО «СПб ГМТУ» инициативных проектах по морской робототехнике, ведущимися в координации с Министерством обороны.
Так создается унифицированный электрический манипулятор модульного функционала ( с 1 - 3 - 5 - 6 степенями свободы в зависимости от количества используемых модулей), с большим вылетом (850 – 1500 мм в зависимости от исполнения) и, пригодного для установки на ТПА осмотрового и легкого рабочего класса, АНПА и донные базовые станции. Манипулятор должен обеспечивать работу в режимах онлайн дистанционного управления оператором и офлайн режиме автоматической работы с использованием систем технического зрения и распознования. Модульный 3х степенной манипулятор в режиме дистанционного управления оператором был продемонстрирован на объединенном стенде «СПб ГМТУ - Океанос» в рамках Международного Военно-Морского Салона – 2017 г., а модульный 5 – 6ти степенной манипулятор должен быть показан в рамках RAO/CIS Offshore 2017.
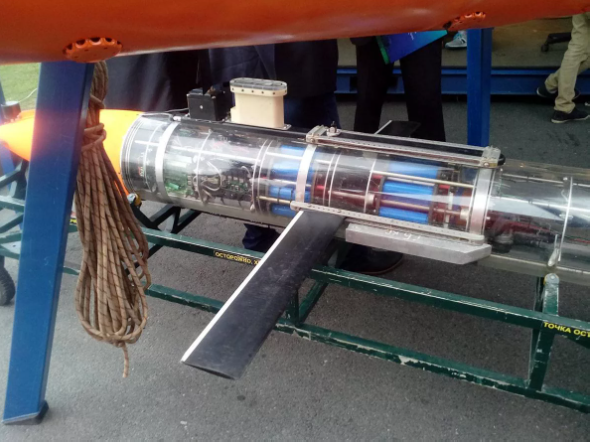
Кроме того, в фазе активных морских испытаний находится проект создания многофункциональной платформы – классического автономного необитаемого подводного аппарата с преимущественно гидродинамическим принципом движения (АНПА – П «Глайдер 2.5»), в ходе которого отрабатываются модули полезной нагрузки в виде датчиков давления и температуры от компании «Радар – ММС» и систем подводной навигации от компании «Лаборатория подводной связи и навигации». При этом полным ходом идет подготовка к выпуску на испытания гибридной версии АНПА–П «Глайдер 3.0» с дополнительным модулем пропульсивного движительного комплекса, обеспечивающим не только более эффективную возможность преодоления течений или разделов сред с разной плотностью, но и возможность применения принципиально новых модулей полезной нагрузки, до этого момента использовавшихся исключительно на АНПА или ТПА – гидролокаторов бокового обзора, лагов и профилографов. Демонстратор технологий «Глайдер 3.0» удачно дебютировал в рамках Международного Военно-Морского Салона – 2017 г. и Международного Военно-Технического Форума «Армия – 2017» вызвав интерес представителей реального бизнеса, связанных с сервисными контрактами в сфере морского нефтегазового комплекса.
Нарабатываемые в процессе выполнения проектов ноу-хау, технические и программные решения, с учетом открытости хода проектов, на этапах выявления, проработки и подготовки патентования с целью защиты авторских прав депонируются в Едином Депозитарии Результатов Интеллектуальной Деятельности (ЕДРИД).
Выход на этап гибридной версии АНПА – П «Глайдер 3.0» не только выводит на новый уровень практической реализации комплекта модульной робототехники АНПА – П классический – АНПА – П гибридный – АНПА – ТПА – ТПА гибридный – донная станция, но и обеспечит ускоренное развитие и отработку группового управления с участием волнового глайдера и микро-АНПА, разрабатываемых коллективом СПб ГМТУ, что еще раз подчеркивает целесообразность комплексного подхода к модульным технологиям в морской робототехнике, особенно с учетом скорейшего массового привлечения морской робототехники к исполнению таких знаковых документов, как «Экологическая доктрина РФ» и «Основы государственной политики РФ в Арктике на период до 2020 г. и дальнейшую перспективу»