

Нефтегазодобывающие платформы представляют объекты повышенной опасности, что обусловлено наличием горючих и взрывоопасных материалов, большим количеством технологического оборудования и социально-бытовых блоков при их компактном размещении, удаленностью от основных сил и средств пожарно-спасательных служб. Анализ аварий, связанных с пожарами и взрывами на нефтегазодобывающих платформах, имевших место в мировой практике, свидетельствует о тяжелых последствиях, связанных с гибелью людей, разрушением технологического оборудования и загрязнением окружающей акватории, что приводит к невосполнимым потерям, значительным материальным убыткам и экологическим катастрофам.
Статистика аварий, произошедших на нефтегазодобывающих платформах за определенный период показал [1], что ущерб от повреждения оборудования при пожарах составляет 52% от общего количества аварий (табл.1).
Таблица 1

Из таблицы хорошо видно, что пожары имеют самые тяжелые последствия. Именно поэтому надежность систем противопожарной защиты и оборудования в целом морских платформ критически важны.
Предотвращение развития пожара и возникновения взрыва в результате аварии на платформе, приводящие к катастрофическим последствиям, может быть осуществлено в результате оперативных и своевременных пожарно-аварийных операций, предпринимаемых с целью локализации и тушения очага горения, охлаждения технологического оборудования с целью недопущения его дальнейшего разрушения. Проведение этих мероприятий силами личного состава, находящегося на платформе, представляется достаточно сложной задачей ввиду их малочисленности и необходимостью эвакуации с аварийного объекта. Привлечение внешних сил и средств с использованием судов, оборудованных средствами подачи водопенных огнетушащих составов, может не дать нужного эффекта в следствии их несвоевременного прибытия к аварийной платформе на начальной стадии пожара, когда ещё возможно локализовать и ликвидировать очаг горения, невозможности подачи водопенных составов непосредственно в зону горения из-за высокой плотности технологического оборудования, а также возможных сложных метеорологических условий (рис.1). Всё это обуславливает необходимость максимально автоматизировать процесс обнаружения и тушения очагов горения на нефтегазодобывающих платформах с использованием безлюдных технологий.

Рис. 1. Тушение пожара на платформе с использованием специализированных судов
Решение данной проблемы может быть реализовано путем применения роботизированных установок пожаротушения (РУП), представляющих собой комплекс средств автоматической пожарной сигнализации и дистанционно-управляемых лафетных стволов, позволяющий в автоматическом режиме обнаруживать очаг возгорания в его начальной стадии развития, активировать систему наведения лафетных стволов пожаротушения и подачи огнетушащих средств непосредственно в очаг горения и на защищаемое оборудование. Отличительной особенностью роботизированных лафетных комплексов является возможность их адаптации к условиям недетерминированного развития аварийной ситуации, тем самым оптимизировать режим тушения, обеспечивая необходимую интенсивность подачи водопенных составов в наиболее опасные технологические зоны без непосредственного присутствия людей. РУП обладает возможностью с одной точки защищать большие площади, которые составляют от 5 до 15 тыс. м2 при расходах от 20 до 60 л/с соответственно. Водоснабжение осуществляется только по магистральной сети, без паутины распределительных сетей, характерных для спринклерных и дренчерных систем.
В случае необходимости управление системой может осуществляться в дистанционном режиме их безопасного места по радиоканалу. Программное управление и разработанные алгоритмы позволяют оптимизировать режимы подачи огнетушащих веществ с учетом динамики развития ситуации, а также с учетом внешних природных факторов, в частности ветровой нагрузки. РУП выполняются на базе лафетных стволов с дистанционным управлением и устройств обнаружения загорания в ИК диапазоне и ТВ-камерами для видеоконтроля. Чувствительность обнаружения очага загорания составляет 0,1 м2, а быстродействие – несколько секунд. Координаты и размеры очага загорания определяются в трехмерной системе координат. Информация о пожаротушении регистрируется видеокамерами с ведением электронного протокола последовательности действий. В дежурное время система самотестируется и сообщает о необходимости коррекции по указанному адресу, поддерживая ее в постоянной боевой готовности.
РУП в ее базовом варианте содержит два и более пожарных робота, включающих в себя следующие компоненты: лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи и пульт управления (рис. 2). Указанные компоненты соединены с блоком коммутации (БК-16) на входе, и с устройством управления (УСО) на выходе. Учитывая специфику эксплуатации РУП в условиях возможного образования взрывоопасных газовых концентраций в зоне их функционирования, конструкция элементов и узлов может быть выполнена во взрывозащищенном исполнении.
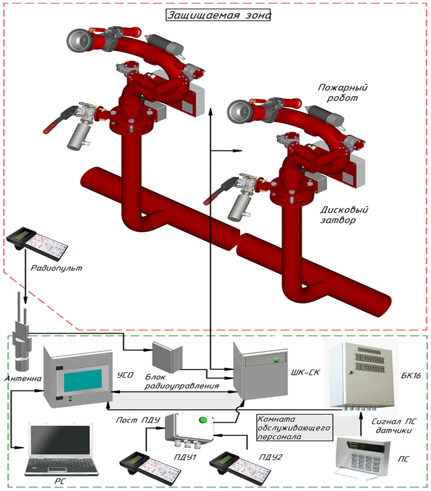
Рис.2. Блок-схема роботизированной установки пожаротушения
Ствол имеет механизмы управления пространственным положением и включает в себя подвижные звенья. Для обеспечения движения в звеньях могут использоваться электрический, гидравлический или пневматический привод. Мехатронная система является объединением электромеханических компонентов с силовой электроникой, которые управляются с помощью встроенных микроконтроллеров. Это уменьшает массу и размеры системы и повышает ее надёжность. Положения рабочего органа в пространстве, данные окружающей среды определяются сенсорной частью системы: датчиками положения, давления, ИК-датчиками. Сигналы, передаваемые датчиками, анализируются, и по результатам анализа принимается решение о дальнейших действиях. Система управления строится на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом. Система управления приводом по положению (по углу поворота ствола) замыкается обратной связью по положению. Внутри системы управления по положению функционирует система управления по скорости со своей обратной связью, внутри которой, в свою очередь, существует контур управления по току с соответствующей обратной связью. Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения ствола, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов.
Устройство управления формирует управляющие команды по наведению ствола и пожаротушению. Устройство обнаружения загорания и теленаблюдения установлено на стволе так, что его оптическая ось расположена в направлении подачи огнетушащего вещества. Данное устройство соединено с устройством обработки сигнала в ИК и УФ диапазонах, в котором программно реализуются алгоритмы определения координат очага загорания, с видеоконтрольным устройством и устройством управления. В результате каждая точка защищаемой зоны орошается не менее чем двумя струями и контролируется двумя устройствами обнаружения загорания и теленаблюдения. На лафетных стволах дополнительно установлены дисковый затвор с приводом и датчик давления, соединенные с блоком коммутации на входе и с устройством управления и адресными пожарными извещателями на выходе.
Обнаружение пламени производится за счет комплексного покадрового анализа изображения с ИК-матрицы и видеокамеры с подтверждением УФ-датчиком, позволяющим отсечь ложные сигналы. На изображении с ИК-матрицы определяются области повышенной температуры, и для этих областей производится накопление и оценка параметров флуктуации температуры, динамики границ и структуры. Для этих же областей производится анализ характерных признаков пламени на видеоизображении (флуктуации, цвет, динамика изменения границ). Алгоритмы анализа реализованы таким образом, чтобы исключать ложные срабатывания на излучение нагретых тел, сварки, проблесковых маячков, солнца и искусственных источников освещения. Для снижения уровня сигнал/шум на видеоизображении в качестве источника используется видеокамера без сжатия стандарта HD-SDI, это позволяет улучшить разрешение для видеоанализа и выдавать качественное видео формата FullHD на видеорегистратор. Анализ видеоизображения осуществляется с частотой 25 Гц, анализ ИК-изображения – 15 Гц. При обнаружении пламени устройство обнаружения передает координаты очага пожарному роботу. Пожарные роботы передают информацию об обнаруженных очагах загорания в устройство сопряжения с объектом, которое методом триангуляции с учетом погрешностей результатов измерений определяет местоположение очага в защищаемой зоне в трехмерной системе координат.
Лидером в создании оптических устройств обнаружения загорания, работающих в видимом и ИК диапазонах, является фирма Tyco, США, входящая в компанию Johnson Controls. Разработанный этими компаниями детектор пламени Flame Vision FV-312SC оснащен встроенной телекамерой. Изделие имеет высокую стоимость и находится под санкциями. В порядке выполнения работ по импортозамещению ООО «ЭФЭР» удалось создать отечественный извещатель пламени ИП 328/330-1-1 во взрывозащищенном исполнении, который имеет значительно меньшую стоимость и более высокие показатели по быстродействию и точности определения координат загорания (рис. 3). На их базе созданы пожарные роботы во взрывозащищенном исполнении.

Рис.3. Извещатель пламени ИП 328/330-1-Ех
Задачей роботизированной установки пожаротушения и входящих в её состав пожарных роботов является наведение струи на очаг загорания по заданным координатам и тушение очага загорания по заданной площади с заданной интенсивностью орошения. Угловые координаты очага загорания в горизонтальной плоскости совпадают с угловыми координатами наведения ствола. Из-за искривлённой траектории струи в вертикальной плоскости, для попадания в цель угол наклона ствола должен быть выше угловой координаты цели (очага загорания). Разница между ними образует угол возвышения, который зависит от расстояния до очага, угла цели, давления в сети, расхода, угла распыливания, конструкции насадка. Задача наведения струи на очаг загорания по заданным координатам сводится к определению угла возвышения. При этом важно, чтобы расчетная траектория с достаточной точностью совпадала с реальной траекторией струи. Теорией баллистики предложены уравнения для траектории полёта тел в воздухе. Для приближённого расчёта струи эти уравнения могут использоваться только на начальной траектории полета и требуют определения эмпирических коэффициентов. Это связано с необходимостью учета изменения площади сечения струи, формы и массы дробящихся в полёте капель воды, перехода от компактной струи к двухфазному турбулентному потоку жидкости и воздуха с изменяющейся плотностью. С учётом большого количества факторов, влияющих на траекторию струи, и отсутствия точной математической модели траектории струи, в данной работе был разработан специальный метод, использующий экспериментальные данные для семейства траекторий. Для получения данных выполнялась инженерная фотосъемка траекторий нескольких сотен струй с разными расходами, давлениями и углами наведения. Была разработана методика прогнозирования траекторий по имеющимся экспериментальным данным (рис. 3-4). В результате достигнута хорошая степень совпадения реальных и расчётных траекторий струй. Расчетные траектории могут использоваться как для определения зон орошения, так и для определения угла наведения по заданным координатам. Программа «Баллистика», приведенная на сайте firerobots.ru, широко используется проектировщиками разных организаций.
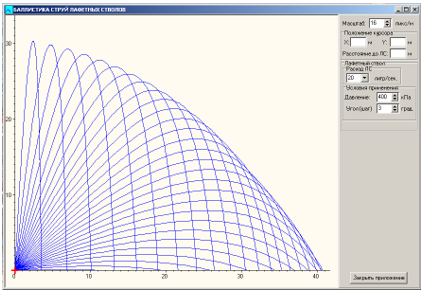
Рис.4. Траектории струй в функции угла наведения для данных расхода и давления
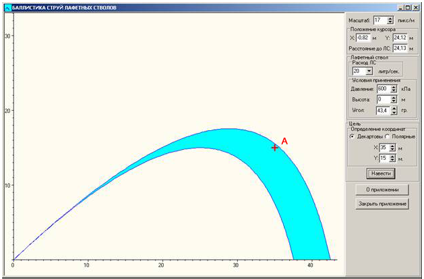
Рис. 4-1. Приложение для расчета траекторий струй и определения угла наведения струи к точке цели.
Проведенная научно-исследовательская работа по баллистике струй, основанная на опытных данных и подтвержденная многочисленными экспериментами, позволила решить задачу наведения струи на очаг загорания по заданным координатам и тушения очага по заданной площади с заданной интенсивностью орошения.
Точность подачи струи на очаг загорания по заданным координатам по баллистической траектории зависит от изменения давления в напорной сети, а для наружных установок – от скорости ветра, отклоняющего струю. Техническими решениями по Европатенту 2599525 «Automated FFC integrating a tv-system» в извещатель пламени ИП 328/330-1-1 введена функция определения струи относительно очага загорания. Это позволяет корректировать наведение струи по расчетным данным для её баллистической траектории.
На рис. 5 зеленым цветом выделены области, где имеются существенные отличия от фона. Синим цветом показан результат аппроксимации верхней части контура (полиномом второй степени) с учётом влияния перспективы. Видно, что синяя кривая совпадает с баллистической траекторией струи.

Рис. 5. Оцифрованный видеокадр с идентификацией потока жидкости
В условиях эксплуатации нефтегазодобывающих платформ при наличии ветрового воздействия необходимо учитывать корректирующую составляющую при наведении подачи водопенной струи в очаг загорания. В целях корректировки наведения лафетных стволов для подачи водопенной струи на очаг горения в условиях внешней ветровой нагрузки были проведены исследования [1], в результате которых была построена комплексированная система технического зрения, позволяющая оценивать реальное отклонение струи от заданного направления и вводить в алгоритм управления наведения стволов поправочные коэффициеты в представленные выше баллистические расчеты струй. На рис. 6 приведены результаты работы созданного прикладного программного обеспечения, решающего задачи определения параметров траектории струи для управления лафетом по азимуту с использованием горизонтальной проекции 3D-модели (рис. 6 а) и возвышению с использованием вертикального сечения 3D-модели (рис. 6 б).
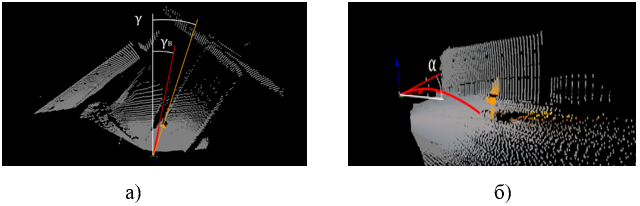
Рис.6. Результат работы прикладного программного обеспечения по корректировки наведения лафетного ствола
Данные методики используется в новых автоматических системах пожаротушения, работающих в экстремальных условиях, опасных для жизни человека, и в безлюдных технологиях, особенно важных для объектов в малонаселенных территориях Сибири и Севера, а также могут применяться для противопожарной защиты морских нефтедобывающих платформ.
Технические требования на РУПТ определены в ГОСТ Р 53326-2009. Следует отметить, что Россия является первой страной мира, где законодательно и нормативно введен новый вид автоматических установок пожаротушения – роботизированные установки пожаротушения. Они введены в федеральный закон страны о пожарной безопасности №123-ФЗ, в свод правил проектирования установок пожаротушения СП5.13130.2009, в государственный стандарт ГОСТ Р 53326-2009 и в ведомственные нормы пожарной безопасности ВНПБ 39-16 на роботизированные установки пожаротушения [3]. Стационарные пожарные роботы на базе лафетных стволов нашли широкое практическое применение [4-5]. Так, например, РУПТ разработанные ООО «ЭФЭР» применялись на объектах нефтегазового комплекса: НПЗ Сызранский, Московский, Туапсинский, Ачинский и др., нефтяные платформы компании «Лукойл», нефтяные морские терминалы в Бургасе и по проекту «Сахалин-1», «Сахалин-2», нефтяные причалы на Черном море (Новороссийск), на Балтике (Высоцк, Усть-Луга), в Арктической зоне на белом море (Витино). Применительно к морским платформам в настоящее время РУПТ нашли применение для защиты взлетно-посадочной площадки (ВПП) ледостойкой стационарной платформы ЛСП-2 совместно с технологической платформой ЛСП-1 на месторождении им. Ю.Корчагина в северной части Каспийского моря. ЛСП-2 включает опорный блок, жилой модуль на 105 каютных мест с расположенной наверху ВПП (рис. 7). Для исключения необходимости дежурства людей у лафетных стволов, взамен двух лафетных стволов с ручным управлением устанавливаются два роботизированных лафетных ствола с электрическим приводом. Лафетные стволы могут работать в режиме дистанционного управления с помощью проводных пультов, а также из любого помещения или участка открытой палубы, доступного по радиоканалу – с помощью выносного радиопульта. Сохраняется также возможность местного управления лафетными стволами вручную.

Рис.7. Общий вид морской платформы на месторождении им. Ю.Корчагина в северной части Каспийского моря с взлетно-посадочной площадкой, оборудованной РУПТ
Литература:
1. Никитин Б.А., Тагиева Р.М. Обеспечение безопасности объектов обустройства морских месторождений.// Краснодар : Просвещение-Юг, 2008. - 204 с.
2. Вазаев А.В., Носков В.П., Рубцов И.В., Цариченко С.Г. Распознавание объектов и типов опорной поверхности по данным комплексированной системы технического зрения. Известия ЮФУ. Технические науки // №2 (175), 2016. С.127-139.
3. ВНПБ 39-16 (СТО 1682.0017-2015). Роботизированная установки пожаротушения. Нормы и правила проектирования. // М. : ВНИИПО МЧС России, 2016. — 84 с.
4. Горбань Ю. И. Пожарные роботы и ствольная техника в пожарной автоматике и пожарной охране. // М. : Пожнаука, 2013. — 352 с.
5. Gorban Yu. I. Fire robots // Industrial Fire Journal. — 2016. — No. 103. P. 12-13.




